



More Intelligence Equals More Efficiency, Enhanced Functionality
Advanced systems require renewed focus on architectures, processors, sensors and networks.

Intelligent controls are continuing to reshape commercial vehicles, giving operators more functions and more space while also improving safety. Increasingly more powerful controls are being integrated to improve efficiency and lighten operator workloads.
Any new features and functions will have to mesh smoothly with an increased focus on safety, which is becoming a mainstay as regulators, efficiency experts and operators alike focus on the losses that occur when protective systems don’t safeguard people and equipment. Safety and functionality are often combined when design goals are set.

“By effectively applying and using technology, customers can get their labor force out of harm’s way by maintaining and checking grade, depth, or slope,” said Mitch Tobias, customer enterprise digital manager at Caterpillar. “Technology can help ensure a precise amount of material in each lift, not overloading or underloading trucks, and placing the material in the right spot. Technology also reduces the number of passes a machine needs to make on compaction by constantly measuring the density of the material — the machine can tell the operator when the right level of compaction is reached, eliminating extra passes.”
One or many?

The intelligent systems being designed into today’s vehicles will lay the foundation for tomorrow’s autonomous vehicles. Mining and ag equipment are already taking the lead in this arena, but more sophisticated technologies will evolve as autonomy moves forward. The extreme computing requirements needed to collect and analyze the data necessary to drive autonomously are challenging design teams tasked with architecting intelligent controls.
“The question is not always whether to use a centralized or decentralized approach, it can simply be which platforms can be useful,” said Benedikt Schonlau, senior manager of automated driving functions at IAV. “If you have input from five or six cameras, all transmitting 100s of Mbytes of data per second, there aren’t any automotive- or off-highway-grade controllers available off the shelf, so you have to go to a decentralized architecture.”
More layers
These architectural challenges form the basis for more levels of complexity. Hardware designers and programmers must deal with myriad issues to create useful, efficient systems that are cost effective. Once marketers and planners have set architectures that allow systems to interact, hardware engineers must get down to the task of creating processing modules and linking them to the sensors that tell them about the outside world.
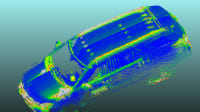
“The challenge is twofold,” said Stephan Tarnutzer, vice president of electronics at FEV. “First, you have to determine what type of sensors are needed and how to integrate them into the vehicle. Then you’ve got to determine how to utilize all that data. It comes in in different protocols and there’s a large volume of data. You’ve got to fuse the data from the vehicle and from the outside to make decisions.”
Combining input from gyroscopes, cameras, tilt sensors, global positioning satellites and other inputs often has to happen quickly so analysis can occur in time to prevent accidents. Design teams must also ensure that these systems are operating correctly.
Minimizing risk

That shines the spotlight on analyzing faults and checking results to confirm that hardware and software are operating as designed. In mission-critical operations such as electronic steering, redundancy is a necessity.
“You need to do a risk assessment and provide redundancy,” said Tom Rudolph, director of portfolio eSteering at Danfoss Power Solutions. “We’ve chosen decentralized controls, with redundancy and two sensor signals coming from the joystick. We run algorithms on the valve, using two separate processors.”
Building intelligence into valves and sensors has become popular in recent years as component suppliers
strive to offer more complete systems. These distributed architectures can help reduce bandwidth requirements and lower the cost of the control modules, since controllers are getting data that’s easier to process than raw sensor data. Many vendors feel this is a cost-effective way to raise vehicle intelligence.
“The addition of more components with microprocessors allows for faster and better control of the machine functions as each micro-processor can perform computations for its local control, but also share important data with other controllers,” said Kirk Lola, business development manager at Parker Hannifin’s Electronic Controls Division. “By spreading out the computational requirements across the whole machine, the overall machine intelligence goes up.”
However, that’s far from a unanimous industry trend. Some OEMs are leveraging the soaring processing capabilities of multicore processors to create powerful controllers that receive raw data from sensors that eschew microcontrollers.
“There’s a bit of a trend to go more to raw data, but a lot of OEMs are going the other way,” Tarnutzer said. “Some of the new architectures are fusing data in a dedicated module that handles the raw data.”
Can CAN continue?
Regardless of whether sensors are sending raw or processed data, there’s a growing need for more band-width. J1939 and CAN have dominated for years, and many users say that’s not changing any time soon.
Multiple CAN networks can provide enough performance to meet near-term bandwidth requirements. But many companies are starting to do more research into Ethernet, which has taken over the industrial world and appears poised to do the same in passenger cars.
“With added sensors and systems comes the need for more data bandwidth and speed,” Tobias said. “Like other industries we are working at improved data transmission of information on our machines, while also ensuring the security of the machine control systems is maintained. Over time we will see CAN bus systems being replaced with a high-speed network, much like what is going on in the automotive industry today.”
Some companies have already decided it’s time to move to more advanced networking. When many critical systems work together for autonomous driving, bandwidth isn’t the only issue. The timing of inputs can be important. For example, knowing that a braking command was issued before a steering command can be critical.
“Current CAN-based architectures do not provide enough bandwidth for all the various systems to connect and operate safely,” said Jose Ogara, product manager at TTControl. “Time Sensitive Networking is essential for all these multiple systems to work together. Ethernet-based networks do provide this amount of bandwidth, and can also support mixed criticality traffic in a vehicle due to its determinism. In other words, non-critical data can share the same channel with critical data while ensuring the safety and timeliness of the critical data.”
More From SAE Media Group
Automotive Engineering
E Pluribus Unum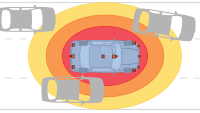
Off-Highway Engineering
Making Sense of Autonomy
Automotive Engineering
No Hands, Lots of Brains
Automotive Engineering
Fusing Sensors for the Automated-Driving Future
Off-Highway Engineering
Shifting Design of Autonomous Architectures
Autonomous Vehicle Engineering
ADAS Computing on a Greater Scale
Off-Highway Engineering
Standards Step Forward in Design of Off-highway Electronics

Electronics & Sensors INSIDER
A New Design Provides the Greatest Precision in Memory to Date
Off-Highway Engineering
Over-The-Air Affair
Autonomous Vehicle Engineering
Rethinking Architectures: From Chips to the Cloud
Off-Highway Engineering
Aftertreatment Comes With Challenging Diagnosis
Off-Highway Engineering
Hydraulics Still in Control of Off-highway Needs
Sensor Technology
Occupancy Monitoring Pre-Packaged
Automotive Engineering
Accelerating Down the Road to Autonomy
Aerospace & Defense Tech Briefs
How Will TSN Ethernet Impact the Future of Embedded Computing?
Off-Highway Engineering
Bits and Bytes Boost Hydraulic System Capabilities
Automotive Engineering
Outlook for Autonomous Driving Includes Cloud

Automotive Engineering
CES 2026: Qualcomm Expands Partnerships For More Snapdragons

Off-Highway Engineering
Engine Developers Increase Efforts to Decrease Fuel Usage
Automotive Engineering
To Serve and Protect
Automotive Engineering
Cameras Look to Go the Distance

Off-Highway Engineering
Autonomous Quarry Haulage in High Demand
Aerospace & Defense Tech Briefs
The CAN Bus: Driving the Future of Autonomous Military Vehicles

Tech Briefs
Product of the Month
Top Stories
INSIDERManufacturing & Prototyping
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
INSIDERManned Systems
![]() FAA to Replace Aging Network of Ground-Based Radars
FAA to Replace Aging Network of Ground-Based Radars
NewsTransportation
![]() CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
NewsSoftware
![]() Accelerating Down the Road to Autonomy
Accelerating Down the Road to Autonomy
EditorialDesign
![]() DarkSky One Wants to Make the World a Darker Place
DarkSky One Wants to Make the World a Darker Place
INSIDERMaterials
![]() Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Webcasts
Defense
![]() How Sift's Unified Observability Platform Accelerates Drone Innovation
How Sift's Unified Observability Platform Accelerates Drone Innovation
Automotive
![]() E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
Power
![]() Hydrogen Engines Are Heating Up for Heavy Duty
Hydrogen Engines Are Heating Up for Heavy Duty
Electronics & Computers
![]() Advantages of Smart Power Distribution Unit Design for Automotive...
Advantages of Smart Power Distribution Unit Design for Automotive...
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design...
Quiet, Please: NVH Improvement Opportunities in the Early Design...