



The CAN Bus: Driving the Future of Autonomous Military Vehicles
It’s a crisp November day in Michigan, and a convoy of British and American resupply vehicles are rumbling along at a comfortable 25 miles per hour. In the lead is a British Army Rheinmetall MAN Military Vehicles (RMMV) HX-60 truck, trailed closely by two U.S. Army Oshkosh Light Medium Tactical Vehicles (LMTVs). In total, there are zero humans operating this convoy.

This was the scene in November 2017, when the US-UK Coalition Assured Autonomous Resupply (CAAR) demonstration took place at Camp Grayling, Michigan – the result of three years of research and engineering to examine the use of unmanned ground vehicles (UGVs) in resupply situations, to tackle so-called “last mile” issues regarding supplying troops on the front lines of active conflicts around the world.
CAAR is a collaboration between the United Kingdom’s Defence Science and Technology Laboratory (Dstl); the U.S. Army’s Tank Automotive Research, Development, and Engineering Center (TARDEC); and the U.S. Army Armament Research, Development, and Engineering Center (ARDEC). While this project had been in the works for three years, the U.S. military has been exploring autonomous vehicle technology in earnest since at least the 1980s. In the time period since then, there have been huge leaps in autonomous vehicle technology, and the military has seen already dangerous and logistically difficult resupply issues multiplied in the era of improvised explosive devices (IEDs) and protracted conflicts in remote and desolate terrains.

The technologies powering these UGVs are cutting edge. Many could hardly have been envisioned a decade ago, but the secret weapon of nearly all of these vehicles is a technology that has been standard in civilian vehicles for nearly 30 years: the Controller Area Network, or CAN bus.
What Is a Controller Area Network (CAN)?
A controller area network (CAN) is a message-based protocol that allows internal systems to communicate with one another without a central computer. CAN technology is used in applications as wide-ranging as agriculture, robotics, industrial automation and medical systems, but it is most known for its use in the automotive industry.
In today’s connected vehicles, the CAN bus facilitates communication between UGVs microcontrollers (MCUs) along a larger vehicle bus, without the use of a central computer. For example, the cruise control system can quickly communicate with the anti-lock braking system to disengage when a quick stop is needed.
The more complex vehicles become, with ever-more interconnected MCUs needing to transfer information, the more important the reliability of the vehicle bus becomes. And with each model year bringing new cameras, sensors and display screens, the efficiencies that CAN provides in the physical layer of a vehicle become more attractive. In the past, cars were limited in their features due to the finite amount of space for the physical cables and complex wiring that was required for each system to communicate. CAN allows for a leaner networked system that not only underlies the connected vehicles of today, but also the drive-by-wire functionality necessary for the autonomous vehicles of tomorrow.
How Is CAN Being Used in Military and Defense Vehicles?
As previously mentioned, the CAN bus has been the communication standard for embedded systems in vehicles for decades, and even huge leaps in vehicle technology like electric and autonomous vehicles have continued to utilize the CAN bus due to its flexibility and reliability. These same features make CAN an ideal component for autonomous military and defense vehicles, including UGVs and unmanned aerial vehicles (UAVs), or drones.
Military Vehicles
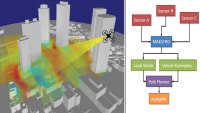
Commercial autonomous vehicles must have highly attuned sensors when navigating city streets – able to sense changing road conditions, other vehicles and pedestrians. Tactical military vehicles, on the other hand, must be prepared for off-road conditions in every kind of hostile environment. The obstacles are greater and the consequences are higher stakes. That means that a higher priority must be placed on sensors and algorithms that can calculate and make split-second decisions; and the need for near-instantaneous, error-free communication is critical. CAN enables all of these complex systems to communicate with the clarity and speed that are necessary when lives are on the line.
In addition to its functionality, CAN’s inherent ruggedness is a clear draw, performing just as consistently in extreme heat and cold as it does in arid and dusty climates and extremely wet conditions.
What Sensors Are Attached to the CAN Bus?
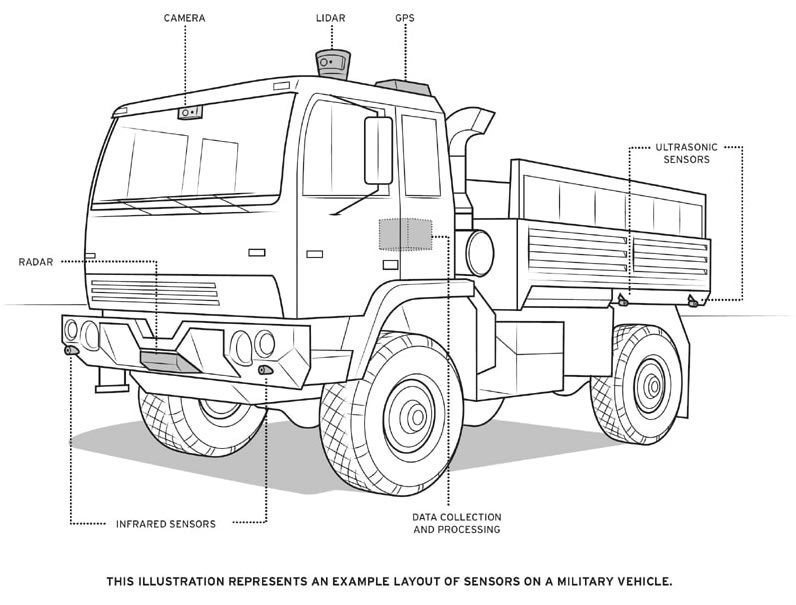
The technologies that enable autonomous driving can vary slightly, but they all require advanced vision and sensing equipment to “see” the road ahead, as well as high-powered software to make decisions based on that visual information. Most autonomous military vehicles would support some combination of the following sensors, among others:
Light Detection and Range (LiDAR) technology, for creating a 3D map of the road ahead;
Color cameras, for determining the changing position of the road and other obstacles in front of the vehicle;
Infrared cameras, adding another layer of complexity to obstacle-sensing;
GPS, for navigation and creating a larger contextual map that the vehicle can reference.
With autonomous vehicles, and especially autonomous tactical vehicles, the in-vehicle networks supporting the advanced vision and sensing technologies require a higher bandwidth connection like those provided by Ethernet or FlexRay. But these connections can combine with CAN or CAN FD (CAN with flexible data rate) to create a robust network that is flexible when performing tasks that require high-data throughput, and that is quick and reliable when performing more simplified communication tasks.

Many military vehicles make use of the CAN bus to log and transfer periodic operational data that are reviewed by maintenance personnel (or, more likely, computer algorithms) for predictive maintenance – in other words, analyzing operational data to look for potential vehicle maintenance issues so that they can be addressed before they become critical.
Drones
The use of the CAN bus isn’t just limited to UGVs. Unmanned aircraft systems (UASs) have also adopted CAN technology for its low-latency, reliable communication capabilities. In fact, there’s even a UAVCAN protocol designed for aerospace and robotic applications.
The CAN bus allows for communication between embedded systems within a UAV, as well as the transfer of information between a UAV and the remote operator.
For instance, the CAN bus can allow the flight controller to manage the throttle on the electronic speed controller (ESC), but it also allows the ESC to return hard real-time data to the flight controller, including temperature, amperage, voltage, warning signals, etc. via live telemetry. The real-time data, transferred within microseconds, allows remote pilots to react immediately, making for much safer and more reliable UAV flight operations.
MilCAN
To account for the many issues specific to military vehicles, a working group of the International High Speed Data Bus-Users Group (IHSDB-UG) developed the MilCAN higher layer protocol in 1999, with the goal of creating a standard interface for utilizing CAN bus in military vehicle development. There are two versions of MilCAN: Mil-CAN A and MilCAN B.
Widely used in armored vehicles, MilCAN A uses 29-bit identifiers and uses a similar frame format to SAE-J1939. Mission-critical in mind, Mil-CAN A prioritizes message transmission, and defines 1-Mbit, 500-Kbps, and 250-Kbit communication rates.
MilCAN B is actually an extension of the CANopen application layer, using 11-bit identifiers and only periodically allowing data to be transmitted via the bus. MilCAN B supports data rates from 10 kbps to 1 Mbps.
Both protocols were developed to specialize the use of CAN around deterministic data transfer, so the specifications can also be used for non-military applications.
The Future of CAN in Autonomous Military Vehicles
Don’t expect robotic armies to be taking over the front lines any time soon, but with successful pilot programs like CAAR demonstrating the viability of heavy-duty military grade autonomous vehicles, there is hope for making extremely risky situations – like resupply missions – a little safer. And for the foreseeable future, the CAN bus will be along for that journey.
This article was written by Jesse Paliotto, Director of Marketing, Kvaser (Mission Viejo, CA). For more information, visit here .
More From SAE Media Group

Tech Briefs
Approach Makes Unmanned Agents Self-Sufficient
Aerospace & Defense Tech Briefs
Autonomous “Wingman” Vehicles
Aerospace & Defense Tech Briefs
Systems Engineering Approach to Develop Guidance, Navigation and Control Algorithms for Unmanned Ground Vehicle
Automotive Engineering
Nvidia Partners with AdaCore to Secure Self-Driving Firmware
Aerospace & Defense Tech Briefs
Soldier-Robot Team Communication: An Investigation of Exogenous Orienting Visual Display Cues and Robot Reporting Preferences
Aerospace & Defense Tech Briefs
Connectors Lighten the SWaP Burden in UAV/MUMT Aircraft Electronics
Aerospace & Defense Tech Briefs
The Evolution of Tactical Robots
Aerospace & Defense Tech Briefs
The Role of Autonomous Unmanned Ground Vehicle Technologies in Defense Applications
Autonomous Vehicle Engineering
StreetDrone: Rolling R&D Vehicle for Small-Scale AV Developers
Aerospace & Defense Tech Briefs
Effectiveness of Inter-Vehicle Communications and On-Board Processing for Close Unmanned Autonomous Vehicle Flight Formations
Sensor Technology
What Will 5G Do for the IoT/IIoT?
Aerospace & Defense Tech Briefs
Robotic Combat Vehicles: Putting the Brains Behind the Brawn
Autonomous Vehicle Engineering
Platform-Agnostic Interface Aims to Accelerate Truck Autonomy

Sensor Technology
RTK and Sensor Fusion for Autonomous Vehicle Navigation & Guidance

Aerospace & Defense Tech Briefs
Industry Invited to Participate in AeroTech Aerospace and Defense Technical Program
Off-Highway Engineering
Peloton Develops a Level 4 Automated Platooning System, but Keeps the Driver in Charge
Aerospace & Defense Tech Briefs
SAE International Extends Call for Abstracts, Seeks Submissions for AeroTech Conference
Off-Highway Engineering
MOBI Rolls out the First Blockchain-Enabled Vehicle Identity (VID) Mobility Standard

Motion Design
Algorithm Helps Swarming Robots Avoid Collisions
Aerospace & Defense Tech Briefs
Drone Swarms: A Transformational Technology

Automotive Engineering
AVSC Develops Best Practices for Traceable AV Safety Inspection Protocols
Aerospace & Defense Tech Briefs
Autonomous Navigation Kits
Top Stories
INSIDERManufacturing & Prototyping
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
INSIDERManned Systems
![]() FAA to Replace Aging Network of Ground-Based Radars
FAA to Replace Aging Network of Ground-Based Radars
NewsTransportation
![]() CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
NewsSoftware
![]() Accelerating Down the Road to Autonomy
Accelerating Down the Road to Autonomy
EditorialDesign
![]() DarkSky One Wants to Make the World a Darker Place
DarkSky One Wants to Make the World a Darker Place
INSIDERMaterials
![]() Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Webcasts
Defense
![]() How Sift's Unified Observability Platform Accelerates Drone Innovation
How Sift's Unified Observability Platform Accelerates Drone Innovation
Automotive
![]() E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
Power
![]() Hydrogen Engines Are Heating Up for Heavy Duty
Hydrogen Engines Are Heating Up for Heavy Duty
Electronics & Computers
![]() Advantages of Smart Power Distribution Unit Design for Automotive...
Advantages of Smart Power Distribution Unit Design for Automotive...
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design...
Quiet, Please: NVH Improvement Opportunities in the Early Design...