



Outlook for Autonomous Driving Includes Cloud
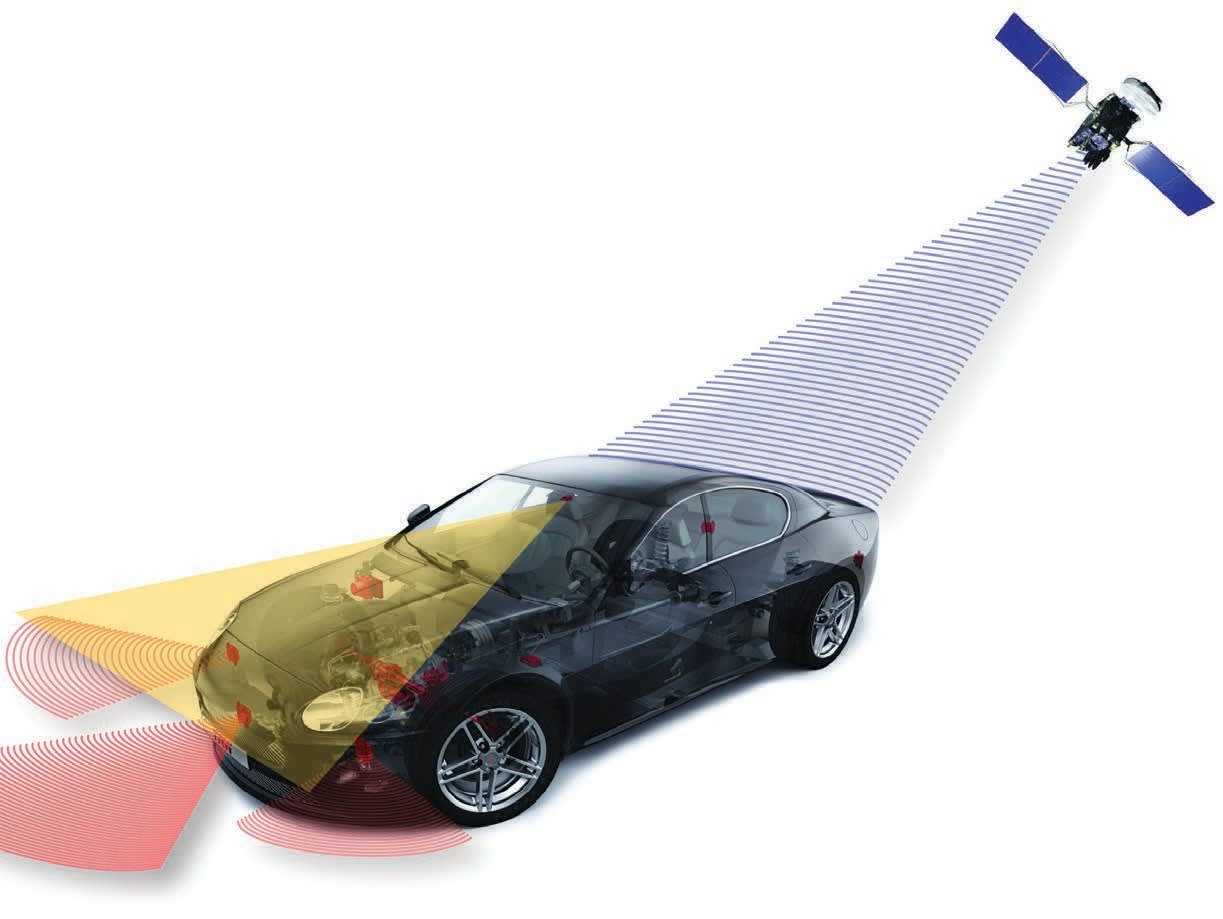
Connectivity with off-board data and services and among vehicles will be crucial in maintaining safety and security in future autonomous vehicles.
Fully autonomous vehicles are still a long ways from volume production, but R&D in this field is ramping up and expanding in many directions. A growing number of companies are focusing on off-vehicle technologies that will augment on-vehicle sensors.
Onboard sensors get most R&D funds, but there’s also long-range development of an infrastructure that leverages the cloud and GPS signals. Blending these inputs with data from on-vehicle sensors isn’t likely to occur in the early phases of autonomous driving. But researchers are racing to make sure they’re ready when demand occurs.

“It may not be as long a push as some people believe; it’s closer than many people believe,” said Andreas Mai, Director of Smart Connected Vehicles at Cisco. “If you had dedicated lanes on highways or dedicated sections in cities that now have dedicated pedestrian or biking areas, you could roll out autonomous vehicles in the next development cycle.”
The benefits of remote inputs can be significant. Data stored in the cloud can be coupled with GPS information, alerting drivers to construction, accidents, and road conditions that might require them to slow down.
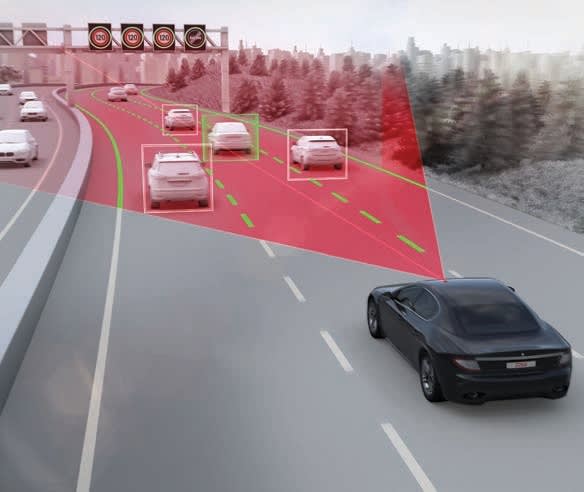
“On-vehicle sensors have a range of 200-300 meters,” said Andy Whydell, Product Planning Manager at TRW Electronics. “It’s useful and important in many cases to get information beyond that range. If traffic is stopped over a small hill, alerts can be provided before cameras or radar could spot the problem.”
Combining all this information won’t be easy. Cameras and radar generate large volumes of data, and locational information will constantly be changing. Combining all these inputs will require lots of hardware and programming resources.
“When sensor fusion involves data from the vehicle’s sensors and data from the outside world, everything has to be synchronized,” said Andrew Poliak, Global Director, Business Development for QNX Software Systems. “Marrying traffic information for routing, information on construction, and other inputs with what on-vehicle sensors see requires a lot of data management.”
Time for clouds
When corporate strategists focus on cloud computing, latency is an issue; many inputs that aren’t time sensitive can be handled remotely. As in many environments, automakers are utilizing proven consumer technologies.
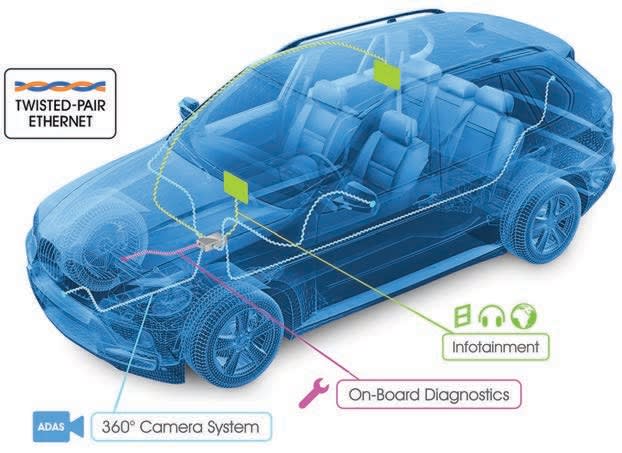
“Ethernet will connect multiple domains in the car, making it easy to collect data and send it off site for processing in the cloud,” said Timothy Lau, Associate Product Line Director at Broadcom. “If you’re taking a trip, you can enter data into your nav system or bring it in with a smart phone. The car can contact the cloud and see data from sensors in vehicles, providing traffic information and data on whether windshield wipers are activated. If wipers are active, the safety systems can be alerted that the roads may be slippery.”
Pulling data from the cloud could help reduce congestion while also improving safety. When vehicles are aligned tightly in convoys, it’s important to know weather and road conditions so safe driving distances can be set.
“When cars put themselves in packs, linked vehicles don’t need large gaps,” said David Pickeral, Transportation Sector Lead for the IBM Industry Smarter Solutions Team. “It helps if they can get data from the cloud that tells them when conditions on the road require slower speeds.”

Many strategists feel GPS data can provide substantial benefits when it’s fused with navigation data and safety systems. Safety can be improved when curves are hard to see, and mileage can be enhanced when cruise control systems know hills are coming.
“When you’re driving at night and can’t see a tight curve, the system can notify you through the HMI,” said Alois Seewald, Global R&D Director and head of TRW’s Safety Integration Team. “If the driver doesn’t respond, it could trigger automated deceleration.”
The remote servers that make up the cloud won’t be able to meet the real-time needs for advanced driver-assistance systems. But localized compute engines could help vehicles respond to the myriad inputs and options that occur as vehicles do more of the driving.
Fog beats cloud
“The cloud has plenty of processing power, but latency is critical,” Mai said. “It may be better to process data on the edge of the network, what we call fog computing. Access points beside the road can filter data, processing time-critical information at the roadside instead of sending it to the cloud, which may be a server in another part of the world.”
Building a cloud-based infrastructure won’t be cheap. Developers must figure out ways to let vehicles move seamlessly between cellular, Wi-Fi, and occasionally even satellite connections. They will also have to write software that’s relevant to drivers. Many feel services will come with a price tag.
“The services you get from the cloud won’t be free,” Seewald said. “Companies will sell information; drivers can take it or leave it.”
Safe and secure
That decision will be predicated on the idea that information is coming from a trusted source, not a hacker who sets up a roadside server. Security is one of the most important aspects of any inputs related to autonomous driving.
“For vehicles to trust information from infrastructure equipment, it has to be secure,” said Ravi Puvvala, CEO at Savari Networks. “One thing that’s lacking now is a business model for a secure structure. There’s a dilemma over who will pay. Governments aren’t going to be able to support it. We may need agreements between telecommunication operators and automotive companies to decide how it will be done.”
Security challenges always evolve as hackers and specialists in protection endeavor to thwart each other.
“Security will also need updating,” Mai said. The vehicle lasts 10 years, while the innovation cycle for people developing malicious software is very short. Updates will have to be broadcast over the air; you can’t expect owners to drive to dealerships every time there’s a new threat.”
Wireless updates will also be critical for keeping autonomous software current. Design teams will improve programs as they get feedback from vehicles and drivers. Keeping driverless cars near state-of-the-art will be important.
“Over time, software will require updating so the lessons learned can be applied to existing vehicles,” Mai said.
More From SAE Media Group
Automotive Engineering
No Hands, Lots of Brains
Autonomous Vehicle Engineering
ADAS Computing on a Greater Scale
Off-Highway Engineering
Connectivity Continues Its Advance
Autonomous Vehicle Engineering
Nvidia’s ‘Kitchen Sink’ for AV Testing
Automotive Engineering
Riding Along With Mercedes and Its in-city Driver Assistance System
Sensor Technology
What Will 5G Do for the IoT/IIoT?

Off-Highway Engineering
HMIs Extend Beyond the Cab
Automotive Engineering
E Pluribus Unum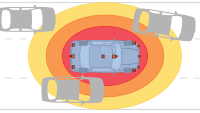


Off-Highway Engineering
Making Sense of Autonomy
Automotive Engineering
To Serve and Protect
Tech Briefs
SAE WCX™ Digital Summit Preview
Autonomous Vehicle Engineering
Platform-Agnostic Interface Aims to Accelerate Truck Autonomy
Off-Highway Engineering
Security, Bandwidth Drive Over-The-Air Development
Autonomous Vehicle Engineering
Making the Strategic Move into AV Testing
Off-Highway Engineering
More Intelligence Equals More Efficiency, Enhanced Functionality

Automotive Engineering
IAA 2025: Qualcomm’s Superbrains Are Here to Help With Automated Driving
Autonomous Vehicle Engineering
Prepping Cities for Vehicle Autonomy
Automotive Engineering
Survey Reveals Cyber, Quality Challenges of Vehicle Connectivity
Off-Highway Engineering
Aftertreatment Comes With Challenging Diagnosis
Autonomous Vehicle Engineering
V2X Signals Are Looking Up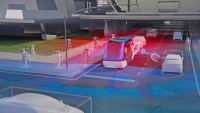


Off-Highway Engineering
Autonomous Quarry Haulage in High Demand
Automotive Engineering
AVSC Develops Best Practices for Traceable AV Safety Inspection Protocols
Automotive Engineering
Mobileye Ready to Meet FMVSS 127 with Vision-Only System
Top Stories
INSIDERManufacturing & Prototyping
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
INSIDERManned Systems
![]() FAA to Replace Aging Network of Ground-Based Radars
FAA to Replace Aging Network of Ground-Based Radars
NewsTransportation
![]() CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
NewsSoftware
![]() Accelerating Down the Road to Autonomy
Accelerating Down the Road to Autonomy
EditorialDesign
![]() DarkSky One Wants to Make the World a Darker Place
DarkSky One Wants to Make the World a Darker Place
INSIDERMaterials
![]() Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Webcasts
Defense
![]() How Sift's Unified Observability Platform Accelerates Drone Innovation
How Sift's Unified Observability Platform Accelerates Drone Innovation
Automotive
![]() E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
Power
![]() Hydrogen Engines Are Heating Up for Heavy Duty
Hydrogen Engines Are Heating Up for Heavy Duty
Electronics & Computers
![]() Advantages of Smart Power Distribution Unit Design for Automotive...
Advantages of Smart Power Distribution Unit Design for Automotive...
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design...
Quiet, Please: NVH Improvement Opportunities in the Early Design...