



Bi-manual Dexterous Manipulation for Maritime Explosive Ordnance Disposal
Since 2001, there has been a proliferation of robots within the U.S. military to assist with Explosive Ordnance Disposal (EOD) missions. Ground robotics systems are able to detect and dispose of Improvised Explosive Devices (IEDs) with the help of robotic manipulator arms.
 These robotic arms are considered true “mobile manipulators”. Mobile manipulators are designed from the ground up to be power-efficient (running off of standard batteries), lightweight, and rugged enough for the rigors of mobile use. These manipulators are integrated into unmanned ground vehicles to enable operators to interact with their environment and neutralize threats. EOD mobile manipulators are specialized for outdoor environments, possess high strength-to-weight ratios, and are able to perform delicate and precise operations while operating in confined, concealed, and cluttered spaces. EOD mobile manipulators are also controlled using teleoperation because a human must be in the loop to deal with explosive threats.
These robotic arms are considered true “mobile manipulators”. Mobile manipulators are designed from the ground up to be power-efficient (running off of standard batteries), lightweight, and rugged enough for the rigors of mobile use. These manipulators are integrated into unmanned ground vehicles to enable operators to interact with their environment and neutralize threats. EOD mobile manipulators are specialized for outdoor environments, possess high strength-to-weight ratios, and are able to perform delicate and precise operations while operating in confined, concealed, and cluttered spaces. EOD mobile manipulators are also controlled using teleoperation because a human must be in the loop to deal with explosive threats.
Unfortunately, IED threats are not limited to ground operations. Waterborne IEDs can be hidden in our ports and waterways. The major challenge for manipulator arm manufacturers today is to come up with a marine variant that can effectively and efficiently perform EOD tasks underwater with low visibility, shifting currents, and corrosive environments.
RE2 Robotics is currently developing two types of underwater manipulator arms with the U.S. Navy’s Office of Naval Research. One is an electro-mechanical system and the other is an inflatable solution that utilizes soft robotics materials. In addition to developing these manipulators, RE2 is also creating novel human-robot interfaces to control high dexterity manipulation systems.
Electromechanical Manipulators
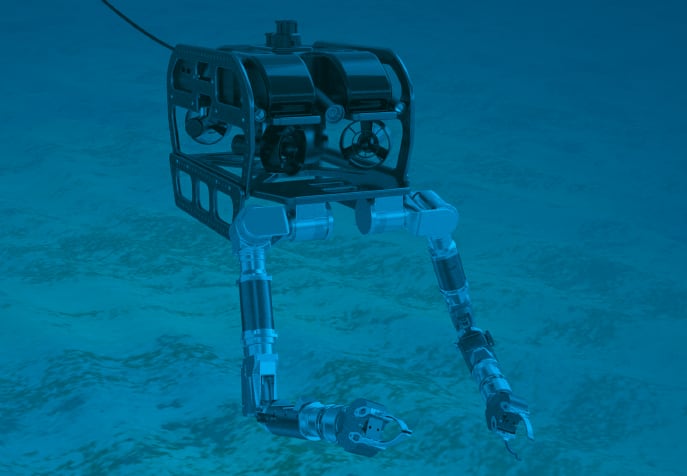
EOD operations within the Navy require Remotely Operated Vehicles (ROVs) that are small enough to maneuver in cluttered or confined spaces. These ROVs have limited space and power, but require dexterous manipulation capability. Hydraulic manipulation solutions, commonly used for underwater applications, are simply too large for these smaller ROVs. Although micro-hydraulics solutions are being researched, these systems are likely to be cost prohibitive in the near term since commercial-off-the-shelf parts are not yet available for hydraulics at that scale. As a result, adapting commonly used electromechanical mobile manipulation actuation for underwater use may be the most viable path for achieving dexterity and strength in a compact, lightweight form. RE2 is now adapting its ground-based electromechanical manipulation technology for use in a marine environment.

There were two major innovations related to joint modules which allowed RE2 to achieve this compact and lightweight, yet high-performance, electromechanical capability.
First, RE2 needed a compact, lightweight motor controller solution. Offthe- shelf motor controllers for DC motors were too large for HDMS. As an example, at the time of development, the smallest motor controller, with the attributes required for controlling HDMS, weighed 82 grams and had a volume of 48mm x 57mm x 38mm. At first glance, this may not appear to be significant. However, 82 grams multiplied by 16 degrees of freedom is approximately 2.9 pounds, which is greater than 8% of the Army’s HDMS weight budget. The heavier off-the-shelf controllers located throughout the arm would also require additional structure and actuator torque in order to maintain performance and house the bulkier off-the-shelf motor controllers, further increasing weight.
Second, overheating is a major cause of DC motor failures. RE2 custom packaged off-the-shelf drive train components at each robotic arm joint to control the heat dissipation path. With optimized heat dissipation, smaller motors were used to achieve similar performance output as larger motors, serving as the main driver of the strength-to-weight ratio realized. By using off-the-shelf components for both the motor controllers and joint modules, both reliability and cost savings due to economies of scale were achieved.
Under an ONR research grant, RE2 is now adapting its innovative joint design for maritime use. Preliminary analysis indicates that minor adjustments are needed to support use undersea. Sealing designs will be modified and changes in materials will be required in places. The greatest benefit of the existing joint design is that it can be filled with oil without affecting the main components, allowing for a design where pressure can be compensated more easily than an air-filled solution. Pressure compensation is critical for use at various depths below sealevel. The oil-filled joint modules will also aid in the design of the marine variant of HDMS to be neutrally buoyant, a critical feature for minimizing the impact of HDMS on the ROV.
Inflatable Manipulators
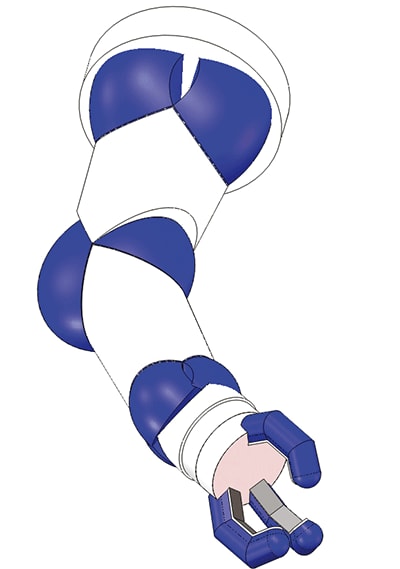
Under an ONR SBIR grant, RE2 is also developing an inflatable high-dexterity robotic manipulator. The inflatable manipulator is based on soft robotics technology. This arm is composed of many cells at each joint with pumps that allow the cell to be filled or emptied with water. As cells are filled, the distal end of the joint rotates “outward”, and when cells are emptied, the distal end of the joint rotates “inward.” If all cells of all joints are inflated, the arm will be fully extended, whereas if all cells of all joint are deflated, the arm will be fully retracted. The structure between the joints is also made of a soft material that can be filled with water to provide structure. The feasibility of using sea water to operate “structure” or “joint” cells is being explored. When emptied, the arm will stow into the ROV, reducing drag as the ROV swims through the water.
Control of Dexterous Manipulators
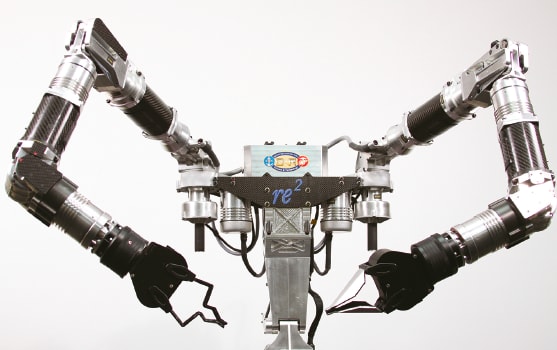
The Navy wants bi-manual dexterous manipulation for underwater EOD operations, whether it is an electro-mechanical or an inflatable solution in order to execute maritime IED operations more quickly and with less risk than current methods. These tools will harness the intellect and experience of the Navy diver but will increase the “length of their arms” when conducting operations.
Traditional control input devices, such as gaming joysticks (e.g. Xbox), are suboptimal for controlling dexterous robotic arms. Controlling a 7-degree-of-freedom arm with a gaming controller in order to “fly the end-effector” in Cartesian space is not very effective because the joint and link positions are indeterminate due to the redundant degrees of freedom, which could cause collisions with the arm. After a decade of researching various control input methods for dexterous robotic arms, RE2 has concluded that using an “imitative controller” is the most intuitive input method using technology available today.
An imitative controller is a scaled model of the arm(s) to be controlled. As the operator moves the scaled arm, the remotely located actual arm mimics the motions of the imitative controller. A gripper controller is mounted at the end of the imitative controller, allowing the operator to control the arm’s gripper too. When using the imitative controller, not only are operators controlling the end-effector, but they are also controlling all joint positions of the arm. This is important in EOD operations as you may need to control exactly where your elbow is, for example, allowing the operator to prevent all parts of the arm from colliding with obstacles in the environment.

The greatest gauge of the imitative controller’s intuitiveness is training time. After a few minutes of training, only hours later, an unskilled operator can quickly become fairly proficient at controlling a 16-degree-of-freedom bimanual manipulation system.
Conclusion
In order to enable ROVs to truly perform EOD tasks underwater, new innovation is needed. RE2 is researching two viable solutions: electro-mechanical and inflatable. The results of these two research efforts will yield significant data to allow the Navy to assess the pros and cons of each approach so that the most viable solution can be integrated with the fleet of ROVs that will be performing these EOD missions. Regardless of the manipulation solution, an intuitive control device, such as the aforementioned imitative controller, will be critical to allow these dual-arm solutions to be effectively used.
This article was written by Jorgen Pedersen, President & CEO, RE2 Robotics (Pittsburgh, PA). For more information, Click Here .
More From SAE Media Group
Aerospace & Defense Tech Briefs
Interoperability Standards Pave the Way for Modular Robotic Manipulators
Aerospace & Defense Tech Briefs
A Modular Approach to Video Designation of Manipulation Targets for Mobile Manipulators
Aerospace & Defense Tech Briefs
Connectivity in Robotic Systems
Aerospace & Defense Tech Briefs
UUV Developments for Defense and Commercial Applications
Aerospace & Defense Tech Briefs
WIAMan
Aerospace & Defense Tech Briefs
The Evolution of Tactical Robots
Aerospace & Defense Tech Briefs
Soft Robotic Fish Swims Alongside Real Ones in Coral Reefs
Aerospace & Defense Tech Briefs
Smarter Pyrovalve Alternatives for Modern Missile and Munition Launcher Applications
Tech Briefs
Thermal Bypass Valves
Aerospace & Defense Tech Briefs
Unmanned Aerial Systems Electromagnetic Induction Sensor Development

Tech Briefs
Lubricating Aerospace One Zulu Pod at a Time
Aerospace & Defense Tech Briefs
XPONENTIAL 2018 – An AUVSI Experience
Aerospace & Defense Tech Briefs
Cold Spray Technology
Aerospace & Defense Tech Briefs
Real-Time, High-Fidelity Simulation of Autonomous Ground Vehicle Dynamics
Aerospace & Defense Tech Briefs
Software Tool Enables High-Fidelity Simulation of Explosive Device Effects
Aerospace & Defense Tech Briefs
Hybrid Auxiliary Propulsion System
Aerospace & Defense Tech Briefs
Robotic Rotational Molding Creates New Opportunities for Military and Aerospace Applications
Aerospace & Defense Tech Briefs
Design Guidelines for Military and Aerospace PCBs
Aerospace & Defense Tech Briefs
Using Forensic Lasers in Modern Warfare
Aerospace & Defense Tech Briefs
Applying UUV Advances to Safeguard Harbors and Littoral Waters
Aerospace & Defense Tech Briefs
Ultra-Light Prototype Vehicle
Aerospace & Defense Tech Briefs
Autonomous Surveillance Technologies Relating to Dismounted Soldiers
Aerospace & Defense Tech Briefs
Drone Swarms: A Transformational Technology
Aerospace & Defense Tech Briefs
The CAN Bus: Driving the Future of Autonomous Military Vehicles
Aerospace & Defense Tech Briefs
Using SWaP-C Reductions to Improve UAS/UGV Mission Capabilities
Aerospace & Defense Tech Briefs
Designing Rugged Computing Platforms for UGVs
Tech Briefs
Thermostatic Control for Thermal Bypass Systems
Aerospace & Defense Tech Briefs
Fully Autonomous Unmanned Vehicles
Tech Briefs
Self-Healing, Recyclable, Shape Memory Polymers
Top Stories
NewsSensors/Data Acquisition
![]() Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
INSIDERRF & Microwave Electronics
![]() A Next Generation Helmet System for Navy Pilots
A Next Generation Helmet System for Navy Pilots
INSIDERWeapons Systems
![]() New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
NewsAutomotive
![]() Ford Announces 48-Volt Architecture for Future Electric Truck
Ford Announces 48-Volt Architecture for Future Electric Truck
INSIDERAerospace
![]() Active Strake System Cuts Cruise Drag, Boosts Flight Efficiency
Active Strake System Cuts Cruise Drag, Boosts Flight Efficiency
ArticlesTransportation
Webcasts
Aerospace
![]() Cooling a New Generation of Aerospace and Defense Embedded...
Cooling a New Generation of Aerospace and Defense Embedded...
Energy
![]() Battery Abuse Testing: Pushing to Failure
Battery Abuse Testing: Pushing to Failure
Power
![]() A FREE Two-Day Event Dedicated to Connected Mobility
A FREE Two-Day Event Dedicated to Connected Mobility
Automotive
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Electronics & Computers
![]() Advantages of Smart Power Distribution Unit Design for Automotive &...
Advantages of Smart Power Distribution Unit Design for Automotive &...
Unmanned Systems
![]() Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance
Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance