



Dynamically Managing Task Allocation Between Humans and Machines in Surveillance Operations
Constructing an Autonomous Manager (AM) for use as an integral component of distributing multiple tasks between humans and autonomous agents, particularly in Intelligence, Surveillance, and Reconnaissance (ISR) applications.
Increasingly sophisticated technology must be leveraged in surveillance environments to enable eventually achieving the goal of allowing analysts to increase throughput by managing multiple simultaneous feeds. Maintaining this increased tasking will likely introduce additional workload and fatigue. Fortunately, analysts can currently offload some of these tasks to automation and will, in the future, be able to offload additional tasking to streamline the intelligence analysis process.
Currently, various speech-to-text and text-to-speech programs can be used to convert spoken information into chat and automation can be used to copy text to multiple needed locations simultaneously. Automation has aided in the transmission of information between analysts and organizations. Tools are also being developed to augment the detection of important visual features within surveillance scenes. However, the degree of assistance autonomous systems can provide is still somewhat limited for cognitively complex tasks, but progress is being made incrementally toward viable assistive tools. Balancing analyst workload while maintaining multiple tasks will require intelligent and dynamic distribution of tasks between humans and autonomy.
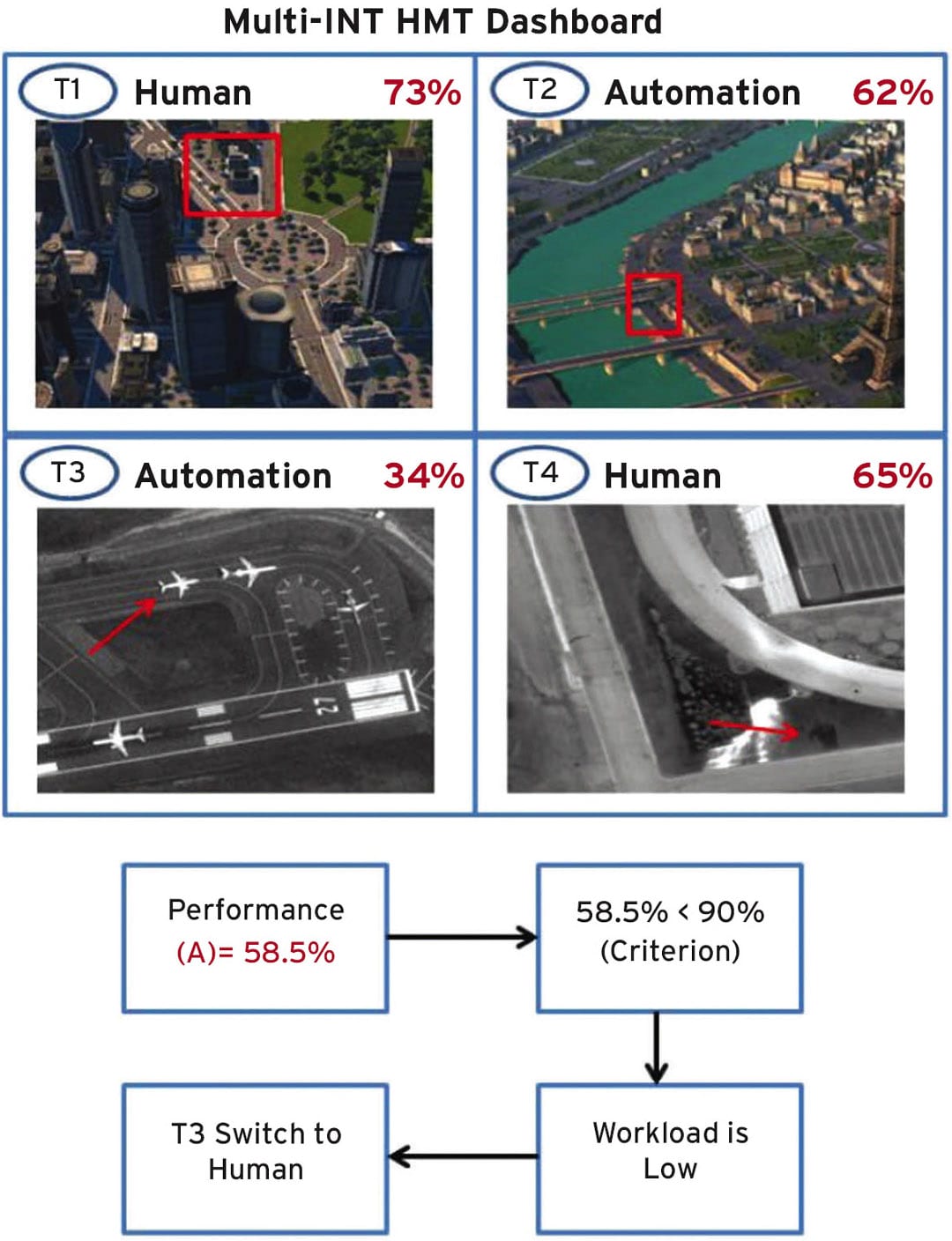
To address this challenge of maintaining performance in a Human-Machine Team (HMT), a program was developed to dynamically distribute tasks between a human and automation. By re-conceptualizing the team dynamic within the surveillance working environment, it was possible to develop a supervisory role called the Autonomous Manager (AM). The AM dynamically reallocates tasks based on task performance and physiological indicators of a human analyst's workload.
The AM's decision logic was tested across multiple scenarios using simulation, allowing the examination of the benefits and limitations of the AM more thoroughly than would be feasible with a series of empirical studies using human subjects. The benefits of the AM were tested based on performance improvement across tasks, improvement with highly variable mean performance, and specific use-case scenarios. The simulated AM can be leveraged to answer a variety of real-world questions without the expense of physical implementation, prior to full-scale development or empirical testing.
In most work environments, accuracy and efficiency are both crucial. To continue growing productivity and throughput, work organizations must increasingly rely on sophisticated automation to complete complex tasks. However, many cognitively taxing tasks cannot be performed by automation to a level of proficiency that matches an expert human at full arousal (i.e., an analyst who is not heavily fatigued or overworked). Integration of automation into real-world workplaces demands effective HMT to compensate for the relative strengths and weaknesses of each human and machine agent. Prior autonomy research has attempted to establish an appropriate balance of tasks from a range of theoretical perspectives. The perspective taken for development of this AM tool was from previous work in managing multiple tasks with humans and machines with twofold assumptions:
Tasking can be distributed according to a spectrum, ranging from automation/machine having full control to human having full control. There are variable degrees of split tasking between humans and automation/machines that can include parsing complete or partial tasks between agents.
Dynamic implementation of automation provides a greater benefit than simple substitution of a single or multiple humans. There are times where human control of tasks may be more appropriate and other times where automation control of tasking is more appropriate, based on features such as workload or fatigue.
This work was done by Mary Frame and Alan Boydstun of Wright State Research Institute for the Air Force Research Laboratory. For more information, download the Technical Support Package (free white paper) from the link below. AFRL-0307
This Brief includes a Technical Support Package (TSP).
Dynamically Managing Task Allocation Between Humans and Machines in Surveillance Operations
(reference AFRL-0307) is currently available for download from the TSP library.
Don't have an account?
More From SAE Media Group
Aerospace & Defense Tech Briefs
3D Data Acquisition Platform for Human Activity Understanding
Aerospace & Defense Tech Briefs
AIA Predicts Flying Air Taxis, Supersonic Air Travel, and Space Industry for 2050
Aerospace & Defense Tech Briefs
Industry Invited to Participate in AeroTech Aerospace and Defense Technical Program
Aerospace & Defense Tech Briefs
Optimal UAS Assignments and Trajectories for Persistent Surveillance and Data Collection from a Wireless Sensor Network
Aerospace & Defense Tech Briefs
DDDAMS-based Urban Surveillance and Crowd Control via UAVs and UGVs
Aerospace & Defense Tech Briefs
Modeling Space-Based Intelligence, Surveillance, and Reconnaissance (ISR) in Combat Simulations
Aerospace & Defense Tech Briefs
Soldier-Robot Team Communication: An Investigation of Exogenous Orienting Visual Display Cues and Robot Reporting Preferences
Motion Design
Teaching Robots the Craft of Manipulating Materials
Aerospace & Defense Tech Briefs
New University-Led Air Force Center of Excellence Focuses on Securing Autonomous Systems Operating in Contested Environments
Aerospace & Defense Tech Briefs
SAE International Extends Call for Abstracts, Seeks Submissions for AeroTech Conference
Aerospace & Defense Tech Briefs
Quantifying Autonomous Soaring on a Surveillance and Communications Relay Mission
Aerospace & Defense Tech Briefs
Developing Knowledge and Understanding for Autonomous Systems for Analysis and Assessment Events and Campaigns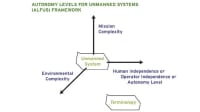
Motion Design
Technique Allows Mobile Robots to Navigate Autonomously
Aerospace & Defense Tech Briefs
Lockheed Martin’s “Non-Operational” Space Fence Detects Indian Anti-Satellite Operations While Still in Test Mode
Aerospace & Defense Tech Briefs
Human-Focused Research Aims to Enhance UAS Effectiveness, Readiness
Aerospace & Defense Tech Briefs
Adding Context to Full-Motion Video for Improved Surveillance and Situational Awareness
Robotics & Automation INSIDER
Innovative Robot Navigation Inspired by Brain Function Boosts Efficiency and Accuracy
Tech Briefs
Smart Micro-Robots Learn to Swim with AI
Aerospace & Defense Tech Briefs
Quantifying Generative AI in Defense Applications
Aerospace & Defense Tech Briefs
Video Encoders
Aerospace & Defense Tech Briefs
Will Generative AI Transform Robotics?
Aerospace & Defense Tech Briefs
New Zealand and LeoLabs Establish the First Low-Earth Orbit Regulatory Platform
Aerospace & Defense Tech Briefs
Stochastic Surveillance and Distributed Coordination
Aerospace & Defense Tech Briefs
Armored Vehicle Mission Management System
Tech Briefs
Giving Autonomous Vehicles the Ability to Reason
Aerospace & Defense Tech Briefs
DARPA’s Latest Drone Swarm Sprint Focuses on Virtual Environments
Aerospace & Defense Tech Briefs
Drone Swarms: A Transformational Technology

Aerospace & Defense Tech Briefs
Impact of Satellite Intelligence, Surveillance and Reconnaissance on Modern Naval Operations
Overview
The document titled "Dynamically Managing Task Allocation Between Humans and Machines in Surveillance Operations" is an interim report that discusses the integration of human operators and automated systems in surveillance tasks. Authored by Mary Frame, Alan Boydstun, and Jennifer Lopez, the report is part of a project sponsored by the Air Force Research Laboratory's Human-Centered ISR Division.
The primary focus of the report is to explore methods for dynamically managing task allocation between humans and machines, particularly in complex and potentially chaotic environments. The authors emphasize the importance of optimizing this collaboration to enhance performance and efficiency in surveillance operations. The report outlines the challenges faced in these environments, including the need for adaptability and responsiveness to changing conditions.
Key components of the research include the development of frameworks and algorithms that facilitate real-time decision-making regarding task assignments. The report discusses how these frameworks can assess the capabilities of both human operators and automated systems, allowing for a more effective distribution of tasks based on situational demands. This dynamic allocation aims to leverage the strengths of both humans—such as critical thinking and situational awareness—and machines—such as speed and data processing capabilities.
The document also highlights the significance of maintaining human oversight in automated processes, ensuring that operators remain engaged and can intervene when necessary. This balance is crucial for maintaining operational effectiveness and safety, particularly in high-stakes surveillance missions.
Additionally, the report provides insights into the potential for performance improvement in noisy or chaotic environments, suggesting that the proposed systems can continue to deliver value even under challenging conditions. The authors advocate for ongoing research and development in this area to refine the methodologies and technologies involved.
Overall, the report serves as a foundational document for understanding the complexities of human-machine collaboration in surveillance operations. It underscores the need for innovative approaches to task management that can adapt to the evolving landscape of military and intelligence operations, ultimately aiming to enhance mission success and operational readiness. The findings and recommendations presented in this interim report are intended to inform future research and practical applications in the field.
Top Stories
NewsSensors/Data Acquisition
![]() Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
INSIDERRF & Microwave Electronics
![]() A Next Generation Helmet System for Navy Pilots
A Next Generation Helmet System for Navy Pilots
INSIDERWeapons Systems
![]() New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
NewsAutomotive
![]() Ford Announces 48-Volt Architecture for Future Electric Truck
Ford Announces 48-Volt Architecture for Future Electric Truck
INSIDERAerospace
![]() Active Strake System Cuts Cruise Drag, Boosts Flight Efficiency
Active Strake System Cuts Cruise Drag, Boosts Flight Efficiency
ArticlesTransportation
Webcasts
Aerospace
![]() Cooling a New Generation of Aerospace and Defense Embedded...
Cooling a New Generation of Aerospace and Defense Embedded...
Energy
![]() Battery Abuse Testing: Pushing to Failure
Battery Abuse Testing: Pushing to Failure
Power
![]() A FREE Two-Day Event Dedicated to Connected Mobility
A FREE Two-Day Event Dedicated to Connected Mobility
Automotive
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Electronics & Computers
![]() Advantages of Smart Power Distribution Unit Design for Automotive &...
Advantages of Smart Power Distribution Unit Design for Automotive &...
Unmanned Systems
![]() Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance
Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance