



Quantifying Autonomous Soaring on a Surveillance and Communications Relay Mission
Research demonstrates that a surveillance mission is still achievable by unmanned vehicles while performing autonomous soaring.
Missions for small unmanned aircraft (Group 1 and Group 2) include over-the-hill surveillance and providing airborne communications relay points. Greater endurance is almost universally desired by operators to increase the time spent on-station performing the mission and reduce the number and frequency of takeoffs and landings.
Autonomous soaring techniques were first proposed by Wharington and refined by Allen as a method to find convective thermal updrafts and gain altitude energy. While several autonomous soaring algorithms have been implemented on unmanned aircraft and demonstrated significant endurance gains, the technology of autonomous soaring has not yet bridged the gap from research to practical application for a mission.
Rather than providing a fixed geometric orbit to continuously track a target on the ground, an aircraft in autonomous soaring mode maneuvers into and moves with thermal updrafts. This maneuvering is often believed to be counterproductive to a surveillance mission, especially if the ground target is moving against the wind, since thermals tend to drift downwind. However, this research shows a surveillance mission is still achievable while performing autonomous soaring.
Cooperative autonomous soaring is a technique in which multiple aircraft flying in close proximity share information about the local conditions in order to improve each individual aircraft’s performance. Theoretical and implemented demonstrations have shown promising results of two vehicles sharing soaring information. Depenbusch demonstrated multiple aircraft flying simultaneously and sharing soaring data, while also using memory of prior soaring conditions. Storing and remembering areas of lift is a way for a single agent to cooperate with itself and should be explored in future research.
No research has previously tried to use autonomous soaring techniques to carry out a specific mission. Autonomous soaring with mission constraints has been demonstrated, but did not include any attempt to quantify the performance of the mission payload itself. This research attempts to quantify the effect of autonomous soaring on an imagery mission using imagery resolution and time-on-station as metrics. For additional realism, the demonstration also includes a communications relay payload to further add real-world transmission effects.
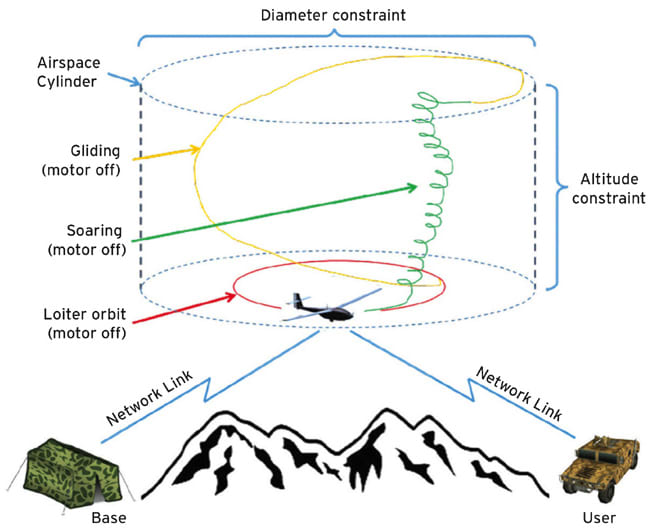
A single-vehicle communications relay concept of operation (CONOP) is shown in Figure 1. This setup uses a single airborne asset providing service to two remote sites. However, maneuvering within the given airspace constraint area may not provide sufficient coverage, and requires the aircraft to operate over the obstruction. Instead, this report proposes two aircraft: one over the base and one over the remote user.
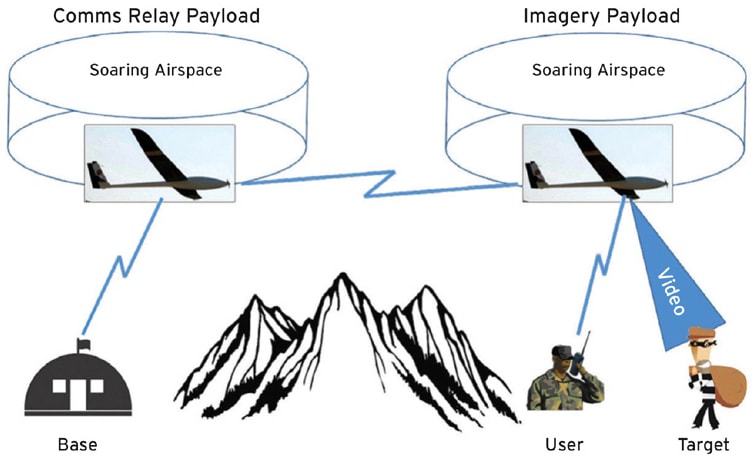
A notional over-the-hill surveillance and communications relay mission is designed to show the potential mission performance enhancement offered by using autonomous soaring technologies. Figure 2 shows a command site that is out of radio frequency (RF) line of sight (LOS) to a remote unit. The RF blockage could be a mountain range, significant distance, urban obstructions, or any other number of complicating factors. In this scenario, two unmanned aircraft provide a communication link between the command base and remote user. Also, the remote user has direct access to the video product, since s/he is on the same network.
A typical Group 1 UAV has only two to four hours of endurance. If the remote site is one to two flight hours away from the launch site, this leaves little or no time on-station actually performing the mission. This research shows how a Group 1 UAV using autonomous soaring and a solar power system can extend the aircraft’s four hours battery-only endurance to more than 12 hours. This will provide uninterrupted imagery over the remote target site.
This work was done by Daniel J. Edwards, Aaron D. Kahn, Sam V. Carter, Phillip Jenkins and David Scheiman for the Naval Research Laboratory. NRL-0078
This Brief includes a Technical Support Package (TSP).
Quantifying Autonomous Soaring on a Surveillance and Communications Relay Mission
(reference NRL-0078) is currently available for download from the TSP library.
Don't have an account?
More From SAE Media Group
Aerospace & Defense Tech Briefs
Martin UAV VTOL Unmanned Aircraft Taps Persistent Systems Wave Relay Data Link Technology
Aerospace & Defense Tech Briefs
Optimal UAS Assignments and Trajectories for Persistent Surveillance and Data Collection from a Wireless Sensor Network
Aerospace & Defense Tech Briefs
Persistent Systems Auto-Tracking Antenna Adds Aircraft to Network, Enhances Data Sharing

Aerospace & Defense Tech Briefs
Curtiss-Wright Black Boxes Receive European Approval
Aerospace & Defense Tech Briefs
New Zealand Will Become a Testbed for Airbus Unmanned Aircraft and Space Technology
Aerospace & Defense Tech Briefs
FLYHT and Spectralux Avionics Integrate Systems to Deliver FANS-Over-Iridium Satellite Communications to Airlines
Aerospace & Defense Tech Briefs
Lockheed Martin’s Next-Gen, 360-Degree Vision System Flies on the Bell V-280 Valor
Aerospace & Defense Tech Briefs
General Atomics Moves Toward Global RPA Flight Certification for MQ-9B SkyGuardian
Aerospace & Defense Tech Briefs
SAE International Extends Call for Abstracts, Seeks Submissions for AeroTech Conference
Aerospace & Defense Tech Briefs
EU to Deploy UAV Traffic Management System by 2019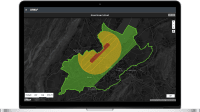
Automotive Engineering
Airbus’ Connected Cabin Concept Is Materializing with First Round of Partnerships
Off-Highway Engineering
Addressing Electromagnetic Compatibility in the Context of Aircraft Electrification
Aerospace & Defense Tech Briefs
Australian Air Surveillance Radar Upgrade
Aerospace & Defense Tech Briefs
Effectiveness of Inter-Vehicle Communications and On-Board Processing for Close Unmanned Autonomous Vehicle Flight Formations
Aerospace & Defense Tech Briefs
New Zealand and LeoLabs Establish the First Low-Earth Orbit Regulatory Platform
Off-Highway Engineering
WCX 2019: IAMTS Association Will Establish Standardization and Testing for Connected Vehicles
Aerospace & Defense Tech Briefs
Abaco’s FORCE2 Flight Computer Enables National and International Ground Control Station Certification
Aerospace & Defense Tech Briefs
Boeing’s Next EcoDemonstrator Test Bed Will Be a 777
Aerospace & Defense Tech Briefs
Insitu ScanEagle SUAS Boosts Coast Guard Mission Effectiveness
Aerospace & Defense Tech Briefs
Aireon to Launch Free, Real-Time Emergency Aircraft Location Service
Aerospace & Defense Tech Briefs
Automatic Drone Detection System
Aerospace & Defense Tech Briefs
Defeating Commercial Drone Threats with Open-Source SDR
Aerospace & Defense Tech Briefs
Lockheed Martin’s “Non-Operational” Space Fence Detects Indian Anti-Satellite Operations While Still in Test Mode
Aerospace & Defense Tech Briefs
Unmanned Aircraft System Offers Superior Surveillance Imagery
Aerospace & Defense Tech Briefs
Connectors Lighten the SWaP Burden in UAV/MUMT Aircraft Electronics
Tech Briefs
Algorithms Improve Quadrotor Drone Performance
Aerospace & Defense Tech Briefs
Small UAV Satcom System
Overview
The document presents a comprehensive exploration of a notional surveillance and communications relay mission utilizing unmanned aircraft (UAVs) equipped with autonomous soaring algorithms and solar photovoltaic systems. The primary objective is to extend the endurance of these aircraft beyond their stored energy limits by harnessing environmental energy sources, specifically thermal updrafts and solar radiation.
The executive summary highlights the integration of multiple coordinated UAVs, each employing autonomous soaring techniques and solar power systems, to enhance mission performance. The report outlines plans for flight testing with two aircraft to quantify the effectiveness of this combined approach in real-world scenarios.
The introduction sets the stage for the discussion by detailing the significance of UAVs in modern surveillance and communication operations. It emphasizes the challenges posed by energy constraints and the potential benefits of using autonomous soaring and solar energy to mitigate these issues.
Subsequent sections of the document delve into the system architecture and software utilized in the UAVs. The architecture is designed to facilitate efficient energy management and communication between the aircraft, allowing them to share information that can improve soaring success rates. The software component is crucial for the autonomous operation of the UAVs, enabling them to make real-time decisions based on environmental conditions.
The test flight section outlines the methodology for evaluating the performance of the UAVs during the planned flight tests. This includes the parameters to be measured and the expected outcomes, which will provide insights into the viability of the proposed system for extended missions.
Analysis and discussion sections will interpret the results from the flight tests, assessing the effectiveness of the autonomous soaring algorithms and solar power systems in achieving mission objectives. The conclusions will summarize the findings and their implications for future UAV operations in surveillance and communications.
Overall, the document underscores the innovative approach of combining autonomous soaring with solar energy to enhance the operational capabilities of UAVs in demanding missions. It aims to contribute valuable knowledge to the field of unmanned aerial systems, paving the way for more sustainable and efficient surveillance and communication solutions.
Top Stories
NewsAutomotive
![]() Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
INSIDERDesign
![]() A Next Generation Helmet System for Navy Pilots
A Next Generation Helmet System for Navy Pilots
INSIDERWeapons Systems
![]() New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
NewsPower
![]() Ford Announces 48-Volt Architecture for Future Electric Truck
Ford Announces 48-Volt Architecture for Future Electric Truck
INSIDERAerospace
![]() Active Strake System Cuts Cruise Drag, Boosts Flight Efficiency
Active Strake System Cuts Cruise Drag, Boosts Flight Efficiency
ArticlesTransportation
Webcasts
Aerospace
![]() Cooling a New Generation of Aerospace and Defense Embedded...
Cooling a New Generation of Aerospace and Defense Embedded...
Test & Measurement
![]() Battery Abuse Testing: Pushing to Failure
Battery Abuse Testing: Pushing to Failure
Internet of Things
![]() A FREE Two-Day Event Dedicated to Connected Mobility
A FREE Two-Day Event Dedicated to Connected Mobility
Transportation
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Electronics & Computers
![]() Advantages of Smart Power Distribution Unit Design for Automotive &...
Advantages of Smart Power Distribution Unit Design for Automotive &...
Aerospace
![]() Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance
Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance