



Experimental Assessment of Entanglement for an Unmanned Underwater Vehicle with an Open, Three-Bladed Propeller
The entanglement of unmanned underwater vehicles (UUV) propelled by open propellers while operating in marine vegetation native to littoral environments can be a threat to mission accomplishment.
This research evaluates the entanglement of an unmanned underwater vehicle (UUV) operating in marine vegetation common to littoral environments. Entanglement was assessed for a traditional UUV with an open, three-bladed propeller transiting a vegetation field at a constant heading and depth. Factors such as the vegetation density, vegetation placement and configuration, propeller revolutions per minute (RPM), and vehicle speed were varied to determine their impact on vehicle entanglement. Results provide insight to the mechanism of entanglement and operating conditions that result in a high or low likelihood of entanglement. These results are of particular interest to the Department of Defense as the military's use of UUVs in littoral environments becomes more prevalent.

Experimental tests were conducted in a tow tank located at the Naval Postgraduate School. Synthetic eelgrass and synthetic giant kelp plants anchored to a plate located at the bottom of the tow tank were used to simulate marine vegetation common to the littorals. The UUV tested in this work was an early variant of the Remote Environmental Measurement UnitS (REMUS) 100 manufactured by Hydroid. The REMUS 100 was attached to a movable carriage located on top of the tow tank using a vertical sting and custom-made adapter. This configuration allowed the REMUS 100 to self-propel itself, and the attached movable carriage, down the tank at a constant depth and heading. Vehicle speed and direction of travel (forward versus astern) was adjusted by changing the propeller RPM of the REMUS 100. A position sensor was used to correlate propeller RPM to the vehicle's steady state speed and to determine the vehicle's speed as a function of position (accelerating speed).
Three different entanglement tests were conducted: a vegetation density and constant speed test, a lateral placement test, and an accelerating speed test. In the vegetation density and constant speed test, the density of giant kelp and eelgrass was varied, and the vehicle steady state speed and propulsion direction (forward versus astern) was varied by changing the propeller RPM. In the lateral placement test, the eelgrass and giant kelp position was offset different distances from the center line of the vehicle. In the accelerating speed test, the propeller entrance speed to an eel-grass field was varied by giving the vehicle a limited distance to accelerate up to speed and thus resulted in the vehicle not being at its steady state speed when it passed through the vegetation field.
The different entanglement conditions identified for each test run were no entanglement, an entanglement event, and an entanglement kill; these conditions were assessed by visually observing the speed of the vehicle as it entered, transited, and exited the vegetation field. During a no entanglement condition, vehicle speed remained constant throughout the entirety of the run. An entanglement event condition was characterized by a decrease in vehicle speed caused by vegetation wrapping around the hub of the vehicle's propeller, but not actually stopping the vehicle, so that eventually the vehicle was able to pass through the vegetation field. An entanglement kill condition was characterized by a decrease in the vehicle speed to zero caused by extensive vegetation wrapping of the vehicle's propeller.
A 2 (marine vegetation type) × 4 (marine density configurations) × 3 (vehicle speeds) × 2 (propulsion directions) × 3 (trials) design was used for the vegetation density and constant speed test. The two marine vegetation types used were giant kelp and eelgrass. The four different marine vegetation density configurations considered were high, medium, low, and single. Three vehicle steady state speeds corresponding to three different propeller RPMs (600, 900, and 1200) were tested.
This work was done by Lieutenant Katherine E. Irgens for the Naval Postgraduate School. For more information, download the Technical Support Package (free white paper) below. NPS-0022
This Brief includes a Technical Support Package (TSP).
Experimental Assessment of Entanglement for an Unmanned Underwater Vehicle with an Open, Three-Bladed Propeller
(reference NPS-0022) is currently available for download from the TSP library.
Don't have an account?
More From SAE Media Group
Aerospace & Defense Tech Briefs
Underwater Acoustic Communication System
Aerospace & Defense Tech Briefs
Applying UUV Advances to Safeguard Harbors and Littoral Waters
Aerospace & Defense Tech Briefs
Electric Propulsion Ship
Robotics & Automation INSIDER
World’s Smallest Programmable, Autonomous Robots
Motion Design INSIDER
Tiny Fans on the Feet of Water Bugs Could Lead to Energy Efficient Mini Robots
Aerospace & Defense Tech Briefs
Electric Hybrid Propulsion System
Motion Design INSIDER
What Robots Can Learn from Sea Stars
Aerospace & Defense Tech Briefs
New Research on Noise Reduction for Next Generation Aircraft Engines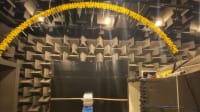
Aerospace & Defense Tech Briefs
Hybrid Auxiliary Propulsion System
Tech Briefs
Fuel Cell Boosts Electric-Powered Vehicles
Aerospace & Defense Tech Briefs
Investigation of Requirements and Capabilities of Next-Generation Mine Warfare Unmanned Underwater Vehicles
Motion Design INSIDER
Remotely Moving Objects Underwater Using Sound

Aerospace & Defense Tech Briefs
Autonomous Undersea Vehicle Completes 100-Hour Demonstration
Motion Design INSIDER
Nimble Dimples: Agile Underwater Vehicles Inspired by Golf Balls
Motion Design INSIDER
AI Shapes Autonomous Underwater “Gliders”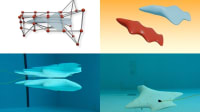
Aerospace & Defense Tech Briefs
Mk 18 Unmanned Underwater Vehicle Systems
Aerospace & Defense Tech Briefs
Design and Analysis of a Small Unmanned Aerial System (UAS) Power Distribution System
Automotive Engineering
Wheel-Hub-Motor Innovations in Flux
Aerospace & Defense Tech Briefs
Enabling Off-the-Shelf Autonomous Naval Warfare
Aerospace & Defense Tech Briefs
Development of a Vision-Based Situational Awareness Capability for Unmanned Surface Vessels
Robotics & Automation INSIDER
Morphing Robot Turns Challenging Terrain to Its Advantage
Aerospace & Defense Tech Briefs
Interoperability Standards Pave the Way for Modular Robotic Manipulators
Motion Design INSIDER
Robot Fish Makes Splash with Motion Breakthrough
Automotive Engineering
UAV Turbines to Tackle 200-Hp Class UAV Engines for U.S. Army
Automotive Engineering
48V Is Coming, and Not Just for EVs
Motion Design INSIDER
Jet-Propelled Sea Creatures Could Improve Ocean Robotics
Aerospace & Defense Tech Briefs
Hybrid-Powered Unmanned Helicopter
Off-Highway Engineering
Allison Purpose-Builds More Powerful TerraTran Transmission
Aerospace & Defense Tech Briefs
UAV Turbines Designs Purpose-Built Microturbine Engine for Class 3 and 4 UAVs
Overview
The document is a master's thesis titled "Experimental Assessment of Entanglement for an Unmanned Underwater Vehicle with an Open, Three-Bladed Propeller," authored by Katherine E. Irgens and submitted to the Naval Postgraduate School in December 2020. The research addresses the critical issue of entanglement faced by unmanned underwater vehicles (UUVs) when operating in environments with dense marine vegetation, such as kelp forests and eelgrass beds.
The study is motivated by the increasing deployment of UUVs for various applications, including environmental monitoring, military operations, and underwater exploration. However, these vehicles are susceptible to entanglement with underwater flora, which can hinder their performance and operational effectiveness. The thesis aims to experimentally assess the entanglement risks associated with a specific UUV model, the REMUS 100, which is equipped with an open, three-bladed propeller.
To conduct the research, the author designed a series of experiments in a controlled tow tank environment, where synthetic models of giant kelp and eelgrass were used to simulate real-world conditions. The experiments involved towing the UUV through these simulated vegetation fields to observe and measure the extent of entanglement that occurred. Various configurations and speeds of the UUV were tested to evaluate how these factors influenced the likelihood of entanglement.
The findings of the thesis provide valuable insights into the dynamics of UUV operation in vegetated environments. The results indicate that certain operational parameters, such as speed and propeller design, significantly affect the entanglement risk. The research highlights the importance of understanding these interactions to improve UUV design and operational strategies, ultimately enhancing their reliability and effectiveness in complex underwater environments.
In conclusion, this thesis contributes to the field of underwater vehicle technology by providing empirical data on entanglement risks and offering recommendations for mitigating these challenges. The insights gained from this research are expected to inform future UUV designs and operational protocols, ensuring safer and more efficient underwater missions. The work reflects the author's commitment to advancing knowledge in marine technology and addressing practical challenges faced by UUVs in real-world applications.
Top Stories
NewsRF & Microwave Electronics
![]() Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
INSIDERAerospace
![]() A Next Generation Helmet System for Navy Pilots
A Next Generation Helmet System for Navy Pilots
INSIDERDesign
![]() New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
INSIDERMaterials
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
NewsPower
![]() Ford Announces 48-Volt Architecture for Future Electric Truck
Ford Announces 48-Volt Architecture for Future Electric Truck
ArticlesAR/AI
Webcasts
Electronics & Computers
![]() Cooling a New Generation of Aerospace and Defense Embedded...
Cooling a New Generation of Aerospace and Defense Embedded...
Automotive
![]() Battery Abuse Testing: Pushing to Failure
Battery Abuse Testing: Pushing to Failure
Power
![]() A FREE Two-Day Event Dedicated to Connected Mobility
A FREE Two-Day Event Dedicated to Connected Mobility
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Automotive
![]() Advantages of Smart Power Distribution Unit Design for Automotive &...
Advantages of Smart Power Distribution Unit Design for Automotive &...
Energy
![]() Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance
Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance