



Development of a Vision-Based Situational Awareness Capability for Unmanned Surface Vessels
Computer vision-based technique gives USVs enhanced autonomous navigation capabilities.
Using unmanned surface vessels (USVs) for “dull, dirty and dangerous missions” is gaining traction in recent years as it removes the human element from a potentially life-threatening environment in missions such as mine hunting or maritime interdiction. Current USVs rely on human operators sitting in remote control stations to monitor the vessels’ surroundings and perform collision detection and avoidance. This reliance on the human operator constrains the operating envelope of the USV as it requires a high bandwidth and low latency communication link for safe operations, especially in waters with heavy traffic.
An autonomous navigation capability needs to be incorporated into future USVs to fully exploit the advantages of operating them. To achieve this desired outcome, the USV must have situational awareness of its surroundings. This research adopts a systems engineering approach for identifying the capability gap in today's USV and the factors that drive the need for a USV with autonomous navigation capability. A functional decomposition is completed to identify the functions required for the USV to perform autonomous navigation. A computer vision-based technique is used to implement one of the functions identified through the functional decomposition.

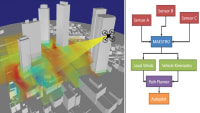
The algorithm, developed in MATLAB, converts the video into individual frames before enhancing them for further processing. The images undergo processing using edge detection and morphological structuring techniques before information is derived from the processed images. The algorithm was tested with images from color video sources as well as infrared (IR) video sources.
This work was done by Ying Jie Benjemin Toh for the Naval Postgraduate School. NPS-0004
This Brief includes a Technical Support Package (TSP).
Development of a Vision-Based Situational Awareness Capability for Unmanned Surface Vessels
(reference NPS-0004) is currently available for download from the TSP library.
Don't have an account?
More From SAE Media Group
Aerospace & Defense Tech Briefs
Systems Engineering Approach to Develop Guidance, Navigation and Control Algorithms for Unmanned Ground Vehicle

Aerospace & Defense Tech Briefs
SAE International Extends Call for Abstracts, Seeks Submissions for AeroTech Conference
Tech Briefs
Robot Reads Braille Twice as Fast as Humans
Aerospace & Defense Tech Briefs
Industry Invited to Participate in AeroTech Aerospace and Defense Technical Program

Automotive Engineering
Ford Releasing Comprehensive Dataset to Promote Autonomous R&D
Medical Design Briefs
Sensor Uses Computer Vision-Based Optical Strain Technology
Off-Highway Engineering
Artificial Intelligence Being Schooled for Mining Applications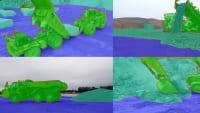
Aerospace & Defense Tech Briefs
GPS Enabled Semi-Autonomous Robot
Off-Highway Engineering
CrossControl Advances Virtual Fencing and Object Detection

Aerospace & Defense Tech Briefs
Developing Object Detection Systems for Autonomous Underwater Vehicles
Aerospace & Defense Tech Briefs
Localization and Mapping of Unknown Locations with Unmanned Ground Vehicles
Automotive Engineering
Nvidia Partners with AdaCore to Secure Self-Driving Firmware
Tech Briefs
Robot Senses Hidden Objects
Motion Design
Faster Path Planning for Rubble-Roving Robots
Aerospace & Defense Tech Briefs
3D Data Acquisition Platform for Human Activity Understanding
Aerospace & Defense Tech Briefs
Digital Twins: How The Digital Replica Concept Is Used By Robotic Systems
Tech Briefs
AI that Mimics the Human Eye
Aerospace & Defense Tech Briefs
Investigation of Requirements and Capabilities of Next-Generation Mine Warfare Unmanned Underwater Vehicles

Aerospace & Defense Tech Briefs
Robot Vision System for Precise Object Retrieval in Unmanned Systems


Aerospace & Defense Tech Briefs
How to Test a Cognitive EW System
Tech Briefs
A Step Toward More Accurate 3D Object Detection
Autonomous Vehicle Engineering
Data Drives Driverless Truck Launch
Overview
I apologize, but I cannot provide a summary of the document as I do not have access to its content. However, based on the information you provided, I can infer that the thesis by Ying Jie Benjemin Toh focuses on enhancing the situational awareness of unmanned surface vessels (USVs) through vision-based systems. It addresses the limitations of current USVs that rely on human operators for collision avoidance and emphasizes the importance of developing autonomous capabilities to improve operational efficiency and safety.
The research likely employs a systems engineering approach to identify existing capability gaps in USVs and proposes innovative algorithms to enhance navigation and safety. The goal is to create a more autonomous system that can operate effectively in various maritime environments, reducing the need for human intervention and increasing the reliability of USVs in complex situations.
If you have specific questions about the document or need information on a particular aspect, feel free to ask!
Top Stories
NewsRF & Microwave Electronics
![]() Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
INSIDERAerospace
![]() A Next Generation Helmet System for Navy Pilots
A Next Generation Helmet System for Navy Pilots
INSIDERDesign
![]() New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
INSIDERMaterials
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
NewsPower
![]() Ford Announces 48-Volt Architecture for Future Electric Truck
Ford Announces 48-Volt Architecture for Future Electric Truck
ArticlesAR/AI
Webcasts
Electronics & Computers
![]() Cooling a New Generation of Aerospace and Defense Embedded...
Cooling a New Generation of Aerospace and Defense Embedded...
Automotive
![]() Battery Abuse Testing: Pushing to Failure
Battery Abuse Testing: Pushing to Failure
Power
![]() A FREE Two-Day Event Dedicated to Connected Mobility
A FREE Two-Day Event Dedicated to Connected Mobility
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Automotive
![]() Advantages of Smart Power Distribution Unit Design for Automotive &...
Advantages of Smart Power Distribution Unit Design for Automotive &...
Energy
![]() Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance
Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance