



Training Drones to Avoid Obstacles at High Speeds

The faster drones fly, the more unstable they become and at high speeds, their aerodynamics can be too complicated to predict. Crashes, therefore, are a common and often spectacular occurrence. But if they can be pushed to be faster and more nimble, drones could be put to use in time-critical operations beyond the race course; for instance to search for survivors in a natural disaster.
MIT has devised an algorithm that helps drones find the fastest route around obstacles without crashing. The new algorithm combines simulations of a drone flying through a virtual obstacle course with data from experiments of a real drone flying through the same course in a physical space.
A drone trained with their algorithm flew through a simple obstacle course up to 20 percent faster than a drone trained on conventional planning algorithms.
More From SAE Media Group
Aerospace INSIDER
Automated Flight Control System for Drone Swarms


Aerospace INSIDER
Drones Learn Autonomous Flying by Imitating Cars and Bikes


Aerospace & Defense Tech Briefs
Robust MADER: Decentralized Multiagent Drone Trajectory Planner

Aerospace INSIDER
Algorithm Flies Drones Faster than Human Pilots
Aerospace INSIDER
AI Algorithms Fly Uncrewed XQ-58A Valkyrie Drone for Three Hour Sortie
Aerospace & Defense Tech Briefs
DDDAMS-based Urban Surveillance and Crowd Control via UAVs and UGVs

Tech Briefs
Approach Makes Unmanned Agents Self-Sufficient
Autonomous Vehicle Engineering
Foretellix Building Precise Software Language for Validating Self-Driving Scenarios
Robotics & Automation INSIDER
New System Enables Robots to Solve Manipulation Problems in Seconds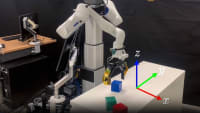
Aerospace & Defense Tech Briefs
Creating and Verifying Stable AI-Controlled Systems in a Rigorous, Flexible Way
Tech Briefs
AI-Powered Action for Rapid Disaster Response
Motion Design INSIDER
Helping Robots Make Good Decisions in Real Time



Aerospace & Defense Tech Briefs
AI Algorithms Fly Valkyrie XQ-58A

Aerospace & Defense Tech Briefs
5 Startups Developing AI for Defense Application
Aerospace & Defense Tech Briefs
Low Cost Air Traffic Control for Drones
Motion Design INSIDER
Charting a Safe Course Through a Highly Uncertain Environment
Aerospace INSIDER
Simulation Software Improves Pilot Training
Aerospace & Defense Tech Briefs
New Method to Measure Wind Speed Could Unlock Drones’ Potential
Motion Design INSIDER
AI-Powered Vision System Helps Drones Navigate Safely
Aerospace INSIDER
Helsing AI Agent Completes Saab Gripen E Test Flight
Top Stories
INSIDERManufacturing & Prototyping
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
NewsUnmanned Systems
![]() Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
INSIDERDesign
![]() A Next Generation Helmet System for Navy Pilots
A Next Generation Helmet System for Navy Pilots
ArticlesSoftware
![]() Accelerating Down the Road to Autonomy
Accelerating Down the Road to Autonomy
INSIDERDesign
![]() New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
ArticlesTransportation
![]() CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
Webcasts
Transportation
![]() Advantages of Smart Power Distribution Unit Design for Automotive...
Advantages of Smart Power Distribution Unit Design for Automotive...
Transportation
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design...
Quiet, Please: NVH Improvement Opportunities in the Early Design...
Electronics & Computers
![]() Cooling a New Generation of Aerospace and Defense Embedded...
Cooling a New Generation of Aerospace and Defense Embedded...
Power
![]() Battery Abuse Testing: Pushing to Failure
Battery Abuse Testing: Pushing to Failure
Transportation
![]() A FREE Two-Day Event Dedicated to Connected Mobility
A FREE Two-Day Event Dedicated to Connected Mobility