



Robust MADER: Decentralized Multiagent Drone Trajectory Planner

Due to its wide range of applications, multiagent UAV trajectory planning has been extensively studied. For reliable real-world deployment, it is essential that a trajectory planner be robust to both communication delays and dynamic environments; however, achieving robustness to both communication delays and dynamic environments has not been addressed in the literature. Multiagent trajectory planners can be centralized (one machine plans every agent’s trajectory) or decentralized (each agent plans its own trajectory). Decentralized planners are more scalable and robust to failures of the centralized machine. Despite these advantages, a decentralized scheme requires communication between the agents, and communication delays could potentially introduce failure in the trajectory deconfliction between the agents. It is also worth noting that there are two layers of decentralization— decentralized planning and decentralized communication architecture. Even if the planning algorithm is decentralized, agents may still require a centralized communication architecture, such as Wi-Fi. Multiagent planners can also be classified according to whether or not they are asynchronous. Asynchronous planning enables each agent to independently trigger the planning step without considering the planning status of other agents. In contrast to synchronous planners, which require all agents to wait at a so-called synchronization barrier until planning can be globally triggered, asynchronous methods tend to be more scalable. They are, however, also more susceptible to communication delays since agents plan and execute trajectories independently.
Many state-of-the-art decentralized trajectory planners do not consider communication delays or explicitly state assumptions about communication. For example, SCP, decNS, and LSC are decentralized and synchronous, but SCP and decNS implicitly and LSC explicitly assume a perfect communication environment without any communication delays. The algorithm decMPC is decentralized, but it requires synchronicity and communication delays to be within a fixed planning period. EDG-Team is a decentralized semi-asynchronous planner, which solves joint optimization as a group. EDG-Team cooperatively tackles the path planning problem but implicitly assumes no communication delays.
ADPP is asynchronous1 and decentralized, but it assumes perfect communication without delay. Our previous work MADER is asynchronous and decentralized but assumes no communication delays. EGO-Swarm also proposes a decentralized, asynchronous planner that requires agents to periodically broadcast a trajectory at a fixed frequency, and each agent immediately performs collision checks upon receiving the message. EGO-Swarm is the first fully decentralized, asynchronous trajectory planner successfully demonstrating hardware experiments, yet it still suffers from collisions due to communication delays, as shown in Section III. AsyncBVC proposes an asynchronous decentralized trajectory planner that can guarantee safety even with communication delays. However, its future trajectories are constrained by past separating planes, which can over constrain the solution space and hence increase conservatism. Further, it relies on discretization when solving the optimization problem, meaning that safety is only guaranteed on the discretization points. Additionally, AsyncBVC was only tested in simulations, so its applicability in real-world hardware is unclear. In contrast, our approach instead is able to guarantee safety in a continuous approach by leveraging the MINVO basis.
Additionally, to achieve reliable real-world deployment, which involves not only static obstacles, but also dynamic obstacles, it is crucial to achieve robustness in dynamic environments. However, as seen in Table II, hardware demonstrations in dynamic environments have not been tested in the literature. For clarification, we define a dynamic environment as an environment with dynamic obstacles. The difference between an agent and an obstacle is that an agent can make decisions based on given information. An obstacle, on the other hand, simply follows a pre-determined trajectory regardless of what else is in the environment.
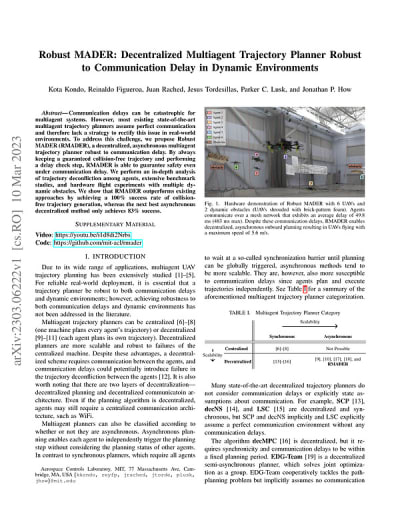
To address robustness to communication delays in dynamic environments, we propose Robust MADER (RMADER), a decentralized and asynchronous multiagent trajectory planner that is capable of generating collision-free trajectories in dynamic environments even in the presence of realistic communication delays. RMADER is the first approach to demonstrate trajectory planning in dynamic environments while maintaining robustness to communication delays.
This work was performed by Kota Kondo and Reinaldo Figueroa for the Massachusetts Institute of Technology. For more information, download the Technical Support Package (free white paper) here under the Vehicles and Robotics category.
This Brief includes a Technical Support Package (TSP).
Robust MADER: Decentralized Multiagent Drone Trajectory Planner
(reference MIT-0623) is currently available for download from the TSP library.
Don't have an account?
More From SAE Media Group



Aerospace & Defense Tech Briefs
DDDAMS-based Urban Surveillance and Crowd Control via UAVs and UGVs
Aerospace & Defense Tech Briefs
Autonomous Surveillance Technologies Relating to Dismounted Soldiers
Tech Briefs
University of Colorado Boulder
Motion Design
Maneuvering Robot Control Using Machine Learning

Aerospace & Defense Tech Briefs
A Simpler Method for Learning to Control a Robot
Aerospace & Defense Tech Briefs
One Person Can Supervise a Swarm of 100 Unmanned Autonomous Vehicles
Aerospace & Defense Tech Briefs
Characterizing Motion Prediction in Small Autonomous Swarms

Aerospace & Defense Tech Briefs
AIA Predicts Flying Air Taxis, Supersonic Air Travel, and Space Industry for 2050
Aerospace & Defense Tech Briefs
Creating and Verifying Stable AI-Controlled Systems in a Rigorous, Flexible Way
Tech Briefs
Approach Makes Unmanned Agents Self-Sufficient

Aerospace & Defense Tech Briefs
Optimal UAS Assignments and Trajectories for Persistent Surveillance and Data Collection from a Wireless Sensor Network
Motion Design INSIDER
Helping Robots Make Good Decisions in Real Time
Tech Briefs
Keeping Drones Flying When a Motor Fails
Aerospace & Defense Tech Briefs
Breathing Life into Artificial Intelligence and Next Generation Autonomous Aerospace Systems
Aerospace & Defense Tech Briefs
Autonomous Collaborative Platform
Aerospace & Defense Tech Briefs
New University-Led Air Force Center of Excellence Focuses on Securing Autonomous Systems Operating in Contested Environments
Off-Highway Engineering
Autonomous Construction Sites


Aerospace & Defense Tech Briefs
Modeling and Simulation Techniques for Unmanned Vehicle Systems
Aerospace & Defense Tech Briefs
Using Java in Avionics and UAV Applications
Tech Briefs
Air Traffic Simulation Tool
Motion Design INSIDER
Unleashing the Power of Intelligent Drone Swarms
Overview
The document presents Robust MADER (RMADER), a decentralized multiagent trajectory planner designed to operate effectively in dynamic environments while accounting for communication delays. Traditional multiagent planners can be classified as synchronous or asynchronous, with RMADER falling into the asynchronous category. This allows agents to independently trigger planning steps without waiting for others, enhancing scalability but also increasing susceptibility to communication delays.
RMADER is notable for its ability to generate collision-free trajectories even in the presence of realistic communication delays, a significant advancement over existing methods. The paper outlines several key contributions of RMADER, including:
-
Collision-Free Trajectory Generation: RMADER guarantees the generation of collision-free trajectories despite communication delays, which is crucial for safe operation in dynamic environments with moving obstacles.
-
Extensive Simulations: The authors conducted comprehensive simulations comparing RMADER to state-of-the-art methods, demonstrating a 100% success rate in collision-free trajectory generation under various communication delay scenarios.
-
Decentralized Hardware Experiments: The paper details hardware experiments involving multiple agents operating on a mesh network, showcasing RMADER's practical applicability in real-world settings.
The document also discusses the concept of Delay Check (DC), a mechanism within RMADER that allows agents to continuously verify if their optimized trajectories conflict with those of other agents. If conflicts are detected, the agent discards the trajectory and re-optimizes, ensuring safety even with communication delays.
In contrast to other asynchronous planners like EGO-Swarm and AsyncBVC, which have limitations such as susceptibility to collisions and reliance on discretization, RMADER employs a continuous approach that enhances safety and robustness. The paper emphasizes the importance of addressing dynamic environments, where obstacles can change trajectories, and highlights RMADER's capability to adapt to such challenges.
Overall, RMADER represents a significant step forward in multiagent trajectory planning, providing a robust solution for real-time applications involving multiple agents and dynamic obstacles. The findings underscore the potential for RMADER to be implemented in various fields, including robotics, autonomous vehicles, and drone operations, where safe and efficient navigation is paramount.
Top Stories
NewsRF & Microwave Electronics
![]() Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
INSIDERAerospace
![]() A Next Generation Helmet System for Navy Pilots
A Next Generation Helmet System for Navy Pilots
INSIDERDesign
![]() New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
INSIDERMaterials
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
NewsPower
![]() Ford Announces 48-Volt Architecture for Future Electric Truck
Ford Announces 48-Volt Architecture for Future Electric Truck
ArticlesAR/AI
Webcasts
Electronics & Computers
![]() Cooling a New Generation of Aerospace and Defense Embedded...
Cooling a New Generation of Aerospace and Defense Embedded...
Automotive
![]() Battery Abuse Testing: Pushing to Failure
Battery Abuse Testing: Pushing to Failure
Power
![]() A FREE Two-Day Event Dedicated to Connected Mobility
A FREE Two-Day Event Dedicated to Connected Mobility
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Automotive
![]() Advantages of Smart Power Distribution Unit Design for Automotive &...
Advantages of Smart Power Distribution Unit Design for Automotive &...
Energy
![]() Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance
Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance