



Using Java in Avionics and UAV Applications
Though developers of avionics software are among the most conservative in the software engineering community, and rightly so, Java is beginning to penetrate even this very specialized industry. The reasons are compelling. Java, designed in the 1990s, offers much better abstraction and stronger object-oriented encapsulation than C and C++. Rigorous enforcement of the type system reduces software engineering errors. Built-in syntactic and library features make multithreaded programming on multi-core processors straightforward. And the popularity of Java makes it easier to recruit Java developers, to license Java development tools, and to find and reuse off-the-shelf software components. Finally, the Java platform offers portability and scalability benefits that far exceed what has been achieved with more traditional legacy languages.
The relevance of traditional software engineering benefits to safety-critical avionics development is growing as the software used for avionics and UAVs increases in size and complexity. At the same time, operational practices for these systems are placing increased demand on modular composition of software components.
Autonomous Systems
Early UAVs were little more than remote-controlled drones, with no onboard decision making, and only the minimal control software required to implement the operations requested by the remote-control operator. More recent UAVs are significantly more capable. Some autonomous UAVs now run their own mission planning software onboard. UAVs that operate autonomously can respond quicker to unanticipated threats and opportunities. They can also capture and assimilate more data from a more flexible array of sensors, and can make more informed decisions based on availability of this information.
In the past, the onboard software for unmanned aircraft was small enough that all of the software for each such system could be fully developed and tested by a small team of two or three developers. Today, the onboard software for autonomous flight is much larger, sometimes reaching sizes as large as a million lines of code. Systems this large cannot be developed from scratch for each individual application. Rather, bodies of safety critical code become a library of intellectual property that is maintained and evolved over multiple decades, and the software may be deployed in different configurations for each mission, and across different related products. The software must be reusable and must be easily configured for each distinct application. Because of the rapid obsolescence of microprocessors, with typical processors and many real-time operating system releases having commercial life spans of less than five years, the software must also be portable so as to preserve its value across multiple processor generations and multiple operating systems.
A recent project funded by the European Commission emphasizes these trends. Known as DIANA for “Distributed equipment Independent Advanced avioNics Applications,” this project explored the use of Java as an empowering technology to enable reduction in the costs of avionics software development. Key to the effort was the design and implementation of an advanced avionics platform, identified as AIDA (Architecture for Independent Distributed Avionics). The cost savings derive from shortened development time, reduced software integration efforts, and decreased certification costs. These benefits are achieved through the portability and scalability benefits of Java, which greatly improve the ease with which software components can be reused, custom-tailored for each different situation, and efficiently integrated within different execution contexts. By deploying Java within partitions of an ARINC 653 kernel, the AIDA approach allows the safety certification evidence developed for each application to be directly reused when the same software is deployed as part of a new application.
Redundancy
A secondary motivation is to keep an aircraft in service even when certain onboard avionics computers may have failed. Typical systems offer redundant flight computers. If one of several flight computers fails, the commercial aircraft or UAV may still be able to remain in service.
Suppose a commercial aircraft or UAV normally runs with three general-purpose AIDA computers. Each of these AIDA computers is running a partitioned kernel and is able to reliably execute multiple mission-critical software modules. In order to fly commercially or launch a particular mission, a certain minimum set of software capabilities must be present. In some cases, certain modules must run redundantly, on different computers or in different partitions of a secure kernel. If one of the three AIDA computers fails to boot, it is disabled and removed from the aircraft. If a replacement computer is not immediately available, the plane may still qualify for commercial flight or UAV missions if the remaining two AIDA computers can be configured to run all of the essential software modules with the required levels of redundancy. The topic of reconfiguring software modules on the ground, in preparation for flight as well as in the air, in case a hardware module fails in flight, has also been considered as part of the DIANA research effort but has not yet been thoroughly studied.
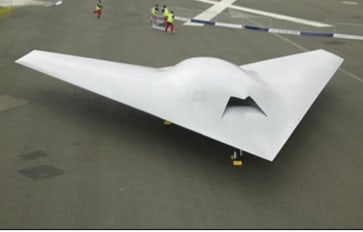
Each avionics software module has different criticality levels. Unmanned aircraft for military applications generally have less stringent safety requirements than commercial aircraft, and several unmanned aircraft have already been programmed with the Java language. Representative applications include ScanEagle by Boeing, Barracuda by EADS, J-UCAS X-45c by Boeing, and Taranis by BAE. The X-45c and Taranis projects are both autonomous aircraft, and the onboard mission planning software for both of these applications is written in Java.

Other differences between traditional Java and the safety-critical standard are that:
- safety-critical Java supports only a very small subset of the standard edition libraries;
- safety-critical Java provides a larger range of real-time priorities and more precisely constrains the behavior of the priority-based scheduler;
- safety-critical Java uses priority ceiling emulation for all thread synchronization.
The draft safety-critical Java standard also adds the ability to directly access device I/O registers and to implement first-level interrupt handlers in the Java language. The use of Java even for the highest integrity components of a safety-critical system appeals because Java is more portable and more modular than C, C++, and Ada, and because it is easier to recruit competent Java developers than it is to recruit developers of other languages.
Summary
In summary, the choice to use Java for avionics software offers improved developer productivity, increased availability of off-the-shelf software components and development tools, greater ease of integrating independently developed software components, and lower costs for software maintenance. The economies of scale associated with the Java language make it easier to recruit Java developers. Traditional Java has already been deployed in a variety of UAV applications, addressing certification concerns by giving special care and attention to the virtual machine implementation and the application software. Traditional Java can be used in less critical applications, such as DO-178B Levels C and D, and it can be used in military and unmanned aircraft applications that are not regulated by the DO-178B guidelines.
To support the highest levels of rigor required by DO-178B Level A certification, as might be required when UAVs operate autonomously within commercial air space, a specification for a safety-critical subset of full Java is being developed with availability expected in 2011. The safety-critical subset differs from traditional Java in restricting libraries, using safe stack allocation instead of a garbage-collected heap, removing support for dynamic class loading, and adding support for device I/O and first-level interrupt handling.
This article was written by Kelvin Nilsen, CTO, Atego Systems (San Diego, CA). For more information, Click Here
More From SAE Media Group
Aerospace & Defense Tech Briefs
Ground Control System
Aerospace & Defense Tech Briefs
Defeating Commercial Drone Threats with Software Defined Radio
Aerospace & Defense Tech Briefs
Achieving Performance Advantages in Unmanned Systems

Aerospace & Defense Tech Briefs
Robust MADER: Decentralized Multiagent Drone Trajectory Planner
Aerospace & Defense Tech Briefs
Autonomous Surveillance Technologies Relating to Dismounted Soldiers

Aerospace & Defense Tech Briefs
Optimal UAS Assignments and Trajectories for Persistent Surveillance and Data Collection from a Wireless Sensor Network
Aerospace & Defense Tech Briefs
A New Approach to Counter-UAS Technology
Tech Briefs
Air Traffic Simulation Tool
Aerospace & Defense Tech Briefs
Test and Evaluation of Autonomy for Air Platforms
Tech Briefs
Drones Use Machine Learning to Detect Landmines
Aerospace & Defense Tech Briefs
Foreign Counter-Unmanned Aerial Systems: Developments in the International Arms Markets
NASA Spinoff
Debugging Code Is Rocket Science
Aerospace & Defense Tech Briefs
DDDAMS-based Urban Surveillance and Crowd Control via UAVs and UGVs
Aerospace & Defense Tech Briefs
Connectors Lighten the SWaP Burden in UAV/MUMT Aircraft Electronics
Aerospace & Defense Tech Briefs
New Method to Measure Wind Speed Could Unlock Drones’ Potential
Aerospace & Defense Tech Briefs
Cyber Risk Assessment and Scoring Model for Small Unmanned Aerial Vehicles
Aerospace & Defense Tech Briefs
Deploying Next-Generation UAS Platforms with 3U VPX
Aerospace & Defense Tech Briefs
Unmanned Aerial System
Aerospace & Defense Tech Briefs
Autonomous Collaborative Platform
Aerospace & Defense Tech Briefs
UAV Applications Challenge the Limits of Embedded Computing Technologies
Aerospace & Defense Tech Briefs
Precision Attack Drone
Aerospace & Defense Tech Briefs
Automatic Drone Detection System
Aerospace & Defense Tech Briefs
Validation of Architecture Models for Coordination of Unmanned Air and Ground Vehicles via Experimentation

Aerospace & Defense Tech Briefs
sUAS-Based Payload Development and Testing for Quantifying Optical Turbulence
Tech Briefs
System Helps Drones Detect and Avoid Power Lines
Aerospace & Defense Tech Briefs
Modeling a UAV-Based Mesh Network to Analyze Latency and Throughput
Aerospace & Defense Tech Briefs
MUSHER Demonstrates Manned-Unmanned Aircraft Teaming Applications
Top Stories
NewsSensors/Data Acquisition
![]() Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
INSIDERRF & Microwave Electronics
![]() A Next Generation Helmet System for Navy Pilots
A Next Generation Helmet System for Navy Pilots
INSIDERWeapons Systems
![]() New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
NewsAutomotive
![]() Ford Announces 48-Volt Architecture for Future Electric Truck
Ford Announces 48-Volt Architecture for Future Electric Truck
INSIDERAerospace
![]() Active Strake System Cuts Cruise Drag, Boosts Flight Efficiency
Active Strake System Cuts Cruise Drag, Boosts Flight Efficiency
ArticlesTransportation
Webcasts
Aerospace
![]() Cooling a New Generation of Aerospace and Defense Embedded...
Cooling a New Generation of Aerospace and Defense Embedded...
Energy
![]() Battery Abuse Testing: Pushing to Failure
Battery Abuse Testing: Pushing to Failure
Power
![]() A FREE Two-Day Event Dedicated to Connected Mobility
A FREE Two-Day Event Dedicated to Connected Mobility
Automotive
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Electronics & Computers
![]() Advantages of Smart Power Distribution Unit Design for Automotive &...
Advantages of Smart Power Distribution Unit Design for Automotive &...
Unmanned Systems
![]() Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance
Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance