



Using Low-Frequency Broadband Sonar on UUVs
Experimenting in Realistic Environments Gets New Technology to Warfighters

A number of science and technology efforts are helping to deliver new combat capability to warfighters.
As the Navy’s corporate laboratory, the U. S. Naval Research Lab (NRL) in Washington, D.C., conducts basic and exploratory research, all the way up to technology that transitions to the warfighter.
NRL has developed a new technology called low-frequency broadband (LFBB), an active sonar that employs synthetic aperture processing, with processing that employs artificial intelligence (AI) for detection and classification.
“LFBB exploits the structural acoustics involved with underwater sonar,” says NRL’s Acoustics Division Superintendent Dr. Brian Houston. “When you transmit sound, the acoustic return is very different, depending on the physical object reflecting that acoustic energy. What’s in the acoustic return is very different for each of those targets. Sonar has traditionally helped us know where something is, how far away it is, and sometime provides an image. But in addition to bearing and range, we can now determine what it is.”
To test the LFBB technology, Houston and his team have used their Reliant and Black Pearl autonomous unmanned underwater vehicles (UUVs) to develop LFBB for mine countermeasures (MCM), anti-submarine warfare (ASW) and Counter-UUV applications. “Reliant and Black Pearl are built on commercially-available 21-inch diameter vehicles from General Dynamics Mission Systems Bluefin Robotics, with our sensor being the special piece of technology on those vehicles that makes them unique research vehicles.”
Houston said that earlier work was done with the Reliant platform, fitted with a first-generation LFBB sonar. Black Pearl is an updated vehicle and a second-generation longer-range LFBB sonar.
According to Houston, the General Dynamics Bluefin Robotics 21-inch vehicles are ‘open ocean capable.’ “They have a lot of energy on them; fairly high-end navigation systems; plus, we have other things on them to make them very useable and capable in the open ocean. We also can go into shallow water areas and even very shallow water areas. So, we like that aspect of it. We want to have some ‘legs’ on the vehicle and navigate accurately. The sensors themselves aren’t consistent with a small vehicle, particularly because the low frequencies require larger sources and sensor apertures. We are doing a lot of onboard processing, so we can take the data and process it on the vehicle to enable autonomous decision making by the sensors, so it has access to the real time processing of the sensor data, and it makes decisions based on that.”
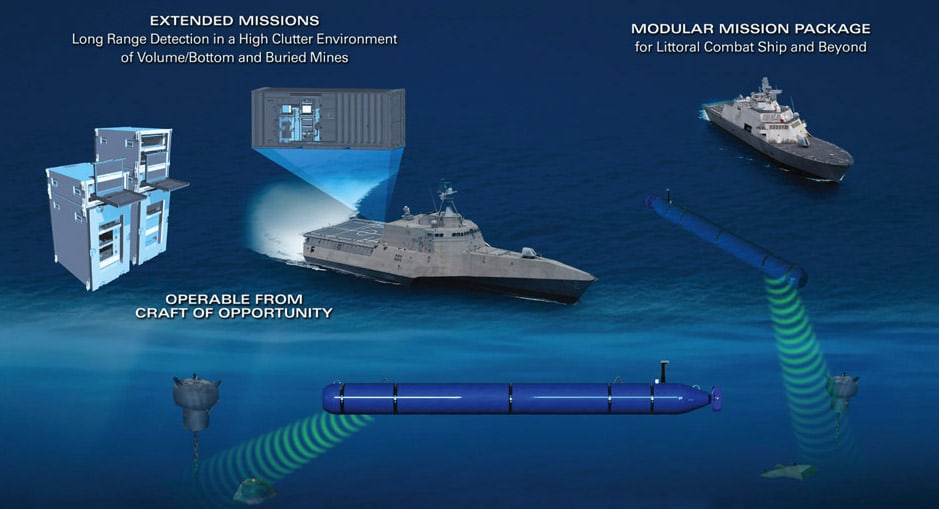
NRL’s research has paid off. The LFBB sonar is becoming operational as part of the Knifefish Surface Mine Countermeasure Unmanned Undersea Vehicle Program, a critical element of the littoral combat ship (LCS) Mine Countermeasure Mission Package, used to find buried, bottom, and volume targets in highly cluttered environments. The system, which employs a General Dynamics Mission System Bluefin-21 vehicle, is currently in low-rate initial production (LRIP).
Knifefish achieved a successful Milestone C decision and approval to enter low-rate initial production (LRIP) in 2019, followed by a contract for five Knifefish systems (10 total UUVs) and support equipment. The first of those Knifefish surface mine countermeasure unmanned underwater vehicle (SMCM UUV) systems were recently delivered to the Navy.
NATO Undersea Experimentation
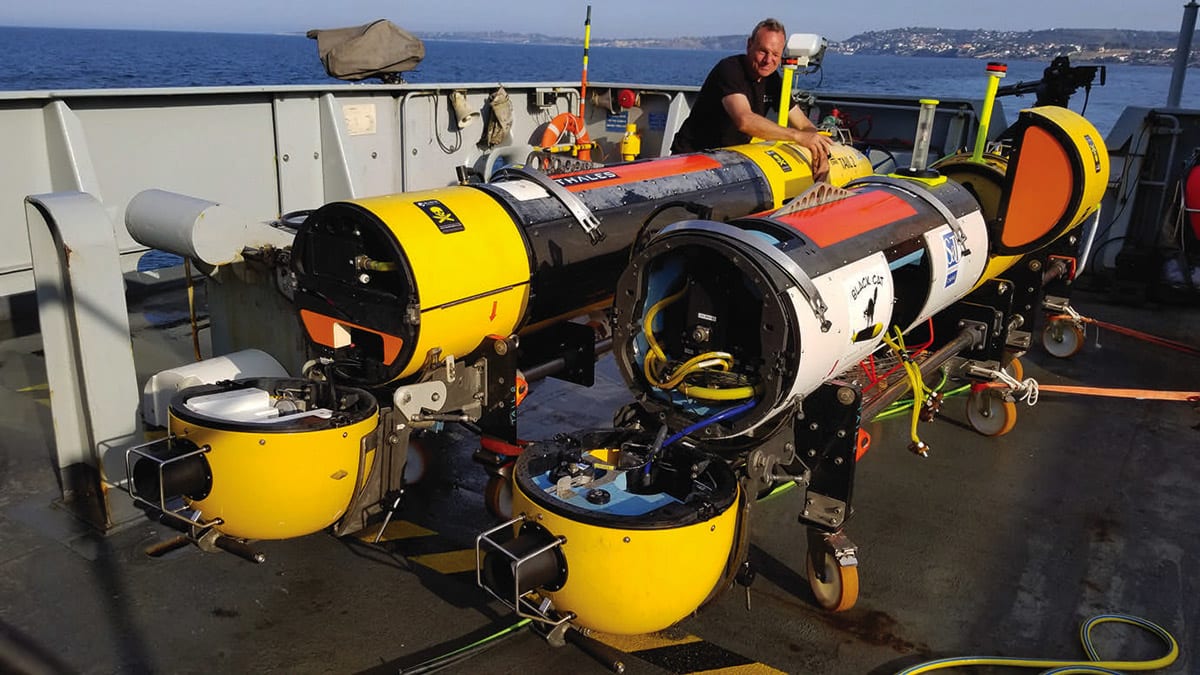
Although their work is unrelated to NRL’s LFBB, the NATO Science and Technology Organization Centre for Maritime Research and Experimentation (CMRE) in La Spezia, Italy, is also using UUVs to solve the complex warfighting challenge of finding mines in the murky waters of the littoral. At the center of the effort is CMRE’s General Dynamics Mission Systems Bluefin-21, adapted as the Minehunting UUV for Shallow Water Covert Littoral Expeditions (MUSCLE) experimentation platform.
CMRE took advantage of the open architecture and modularity of the Bluefin-21 to equip it with a Thales synthetic aperture sonar (SAS), so it can look at large areas quickly with high resolution. The MUSCLE system has onboard memory to help it conduct automatic target recognition. It can recognize and categorize objects in real time, and considers factors such as the quality of data and complexity of the area to determine the threat and level of certainty. It can then replan its mission to reduce that uncertainty.
To improve MCM capabilities, CMRE developed the Distributed and Decoupled Collaborative Autonomy Framework (D2CAF), so UUVs can carry out those missions as a team of autonomous platforms working collaboratively. CMRE adapted a second Bluefin-21 vehicle as a collaborative autonomy test bed—named BlackCAT—to demonstrate D2CAF by having MUSCLE and BlackCAT work together. MUSCLE has an acoustic Doppler current profiler that measures current speed and direction, and can reprogram its search patterns to account for currents.
BlackCAT, which is used for reacquisition, and hosts a version of D2CAF, can be equipped with combinations of a Teledyne Blueview 900 forward-looking sonar (FLS), an optical camera, a Blueview 2.25 MHz multi-beam 3D sonar, and an ARIS Explorer acoustic camera. CMRE also has a pair of Kongsberg Hydroid REMUS 100 vehicles with sidescan sonar and multi-beam echosounder for reacquisition, and an IQUA Robotics SPARUS UUV and ARIS acoustic camera for reacquisition and classification.
Rob Been, deputy head of CMRE’s engineering, said the Bluefin-21 has been robust, sturdy, and reliable. Been said CMRE has upgraded the vehicles with central processing units and graphical processing units to conduct parallel processing. “We have enabled the Bluefin MUSCLE to see underwater in real-time, and thus by looking at the images, determine what to do next.”
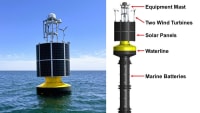
Dr. Samantha Dugelay, program manager for autonomous naval mine countermeasures at CMRE, said the MUSCLE, BlackCAT and other vehicles can communicate with each other using acoustic modems, so the vehicles can cooperate while performing different tasks. When one vehicle sees something of interest, it uses its underwater acoustic modem to send a message to the other vehicle, or to a gateway buoy on the surface, and the gateway buoy sends it back to the ship, so they can see the detections in real time. There’s ATR software onboard MUSCLE so it can determine the type of target, with a measure of confidence. If it detects sand ripples, for example, it can optimize its orientation relative to the sand ripples to get a better look. “With collaborative autonomy, it can also task smaller vehicles to go and inspect a series of detections, collecting video feeds or sonar imagery, which in turn, can be fed back to the ship,” said Dugelay.
“MUSCLE and BlackCAT are two similar Bluefin vehicles that have been adapted to do different things. For example, MUSCLE goes out, conducts the wide-area survey, and finds the detections. BlackCAT has an optical camera and a forward-looking multi-beam echosounder to conduct reacquisition and can further classify the target,” said Dugelay. “The analysis of what it has seen, and the determination about what needs to be done next by the group of vehicles, is done instride onboard the MUSCLE, and it can determine the risk that there may still be something there that it hasn’t found, and it can develop a compound risk map to either go back to further search an area, or deploy other vehicles, like the BlackCAT, to look closer and reduce that risk.”
Dr. Catherine Warner, CMRE’s director, said the Centre’s diverse group of scientists, engineers and technicians from the different NATO Nations conduct basic and applied research, but is also very much “focused on real solutions for today,” including participation in NATO exercises. CMRE has used its 21-inch Ocean Explorer UUVs as part of NATO ASW exercises. They are autonomous and are able to talk to each other and share information about what they are seeing. If one detects a target, it can tell the other one and they can determine the best disposition for them to get the best sonar return to localize and track the target.

Warner said conducting science in an operational context is the best laboratory. “We want to do science in a realistic warfighting environment, so our scientists can have the best understanding of what the operators need, and the operators see how our new technology can help them.”
Innovation Cell
Dr. Christopher Heagney is the science advisor for Commander, U.S. Naval Forces South/Commander, U.S. Fourth Fleet, and leads a team he calls the ‘innovation cell,’ helping the Navy get new capabilities into the hands of the warfighter.
“We’re essentially technology scouts,” Heagney said. “We’re out looking for the latest and greatest technologies being developed by DOD labs, industry and academia, that we can pull forward and bring to the fleet to solve operational needs.”
With the Navy procuring 24 MCM mission packages for the littoral combat ship (LCS), Heagney and his team are looking at how they can employ components of those mission packages even if an LCS is not available. The Military Sealift Command expeditionary fast transport USNS Spearhead (EPF 1), which supports a number of logistics and theater security cooperation missions, can serve as a surrogate LCS platform for testing. “If we think of LCS as the truck, and the mission package as the payload, why can’t we use another vessel of opportunity to accomplish that mission with an MCM adaptive force package? We’re stepping up and saying, ‘Well, we’ve got an EPF if you want to try it on other ships – what other ships do we have that could potentially do this?’ The EPF is a good one.”

Heagney points to a test with Naval Warfare Development Command using a British Royal Fleet Auxiliary ship, the RFA Mounts Bay, to use elements of the LCS MCM mission package from a vessel of opportunity, as a good example. The test used elements of the mission package including the common unmanned surface vessel (CUSV), the Knifefish UUV, Airborne Laser Mine Detection system (ALMDS), Airborne Mine Neutralization System (AMNS), the Mk 18 Mod 1 Swordfish and the Mk 18 Mod 2 Kingfish UUVs, and involved LCS Squadron (LCSRON) 2 Helicopter Sea Combat Squadron (HSC) 2 and HSC-28, and EOD Mobile Unit 2.
“It’s not necessarily the capability of that one particular system, because we assume the vehicle does what it’s supposed to do,” said Heagney. “We want to develop a concept for doing it. It’s proving that we can get it on the ship; that there is battery storage and the ability to recharge them; that there are procedures down so we can actually get it to the crane, and be able to safely deploy the vehicle in the water and then be able to recover it. That’s what we want to demonstrate, because if you put it in the water and tell it to ‘go find mines’ it will find mines, right? But it’s all the ability to launch and recover and do that from multiple ships. I think that’s what really adds to the punch that the Navy can deliver. We’re not just tied to these couple ships to do this mission.”
Heagney said his team brings the scientists out to sea with them. “We want them to get out of the lab and see what it’s like to interface with the fleet.”
While the demonstrations and testing may seem pretty straightforward, Heagney said the maritime environment is ‘crazy difficult.’
“When we take a new technology out on the water, or on a new or different ship, or it’s the first time an operator has seen it, you will be shocked by the results you have,” Heagney said. “And that’s why we do what we do. We learn.”
This article was written by Captain Edward Lundquist, U.S. Navy (Retired).
More From SAE Media Group
Aerospace & Defense Tech Briefs
Underwater Acoustic Communication System
Aerospace & Defense Tech Briefs
Mk 18 Unmanned Underwater Vehicle Systems
Aerospace & Defense Tech Briefs
Enabling Off-the-Shelf Autonomous Naval Warfare
Aerospace & Defense Tech Briefs
Navy to Evaluate Three Large Displacement Unmanned Underwater Vehicle Prototypes
Aerospace & Defense Tech Briefs
MOSA Enclosure Design for Military Systems
Aerospace & Defense Tech Briefs
Portable Diver Detection Sonar System
Aerospace & Defense Tech Briefs
Underwater Security System
Aerospace & Defense Tech Briefs
Autonomous Undersea Vehicle Completes 100-Hour Demonstration
Aerospace & Defense Tech Briefs
Using Underwater Robotics for Autonomous Deep-Sea Exploration
Off-Highway Engineering
Kodiak Adapts Autonomous Tech for Military Vehicles
Aerospace & Defense Tech Briefs
Investigation of Requirements and Capabilities of Next-Generation Mine Warfare Unmanned Underwater Vehicles
Aerospace & Defense Tech Briefs
DoD to Deploy Thousands of Low Cost Autonomous Systems Under Replicator Program
Aerospace & Defense Tech Briefs
Underwater Drone Technology
Aerospace & Defense Tech Briefs
Tactical Data Link Software


Aerospace & Defense Tech Briefs
UUV Developments for Defense and Commercial Applications
Sensing Technology
FAU Engineers Design New Autonomous System to Monitor Arctic Ice Melt
Tech Briefs
The Rise of Resilient Autonomous Vessels

Robotics & Automation INSIDER
World’s Smallest Programmable, Autonomous Robots
Aerospace Manufacturing and Machining INSIDER
Meeting the Demands of Defense Production and Sustainment Through Additive Manufacturing
Motion Design INSIDER
What Robots Can Learn from Sea Stars
Aerospace & Defense Tech Briefs
Applying UUV Advances to Safeguard Harbors and Littoral Waters

Tech Briefs
3D-Printed AUV Aims to Thwart Climate Change
Aerospace & Defense Tech Briefs
Development and Testing of a New Version of MBUD for Cued Classification of Marine UXO
Tech Briefs
University of Colorado Boulder
Aerospace & Defense Tech Briefs
Experimental Assessment of Entanglement for an Unmanned Underwater Vehicle with an Open, Three-Bladed Propeller
Top Stories
NewsRF & Microwave Electronics
![]() Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
INSIDERAerospace
![]() A Next Generation Helmet System for Navy Pilots
A Next Generation Helmet System for Navy Pilots
INSIDERDesign
![]() New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
INSIDERMaterials
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
NewsPower
![]() Ford Announces 48-Volt Architecture for Future Electric Truck
Ford Announces 48-Volt Architecture for Future Electric Truck
ArticlesAR/AI
Webcasts
Electronics & Computers
![]() Cooling a New Generation of Aerospace and Defense Embedded...
Cooling a New Generation of Aerospace and Defense Embedded...
Automotive
![]() Battery Abuse Testing: Pushing to Failure
Battery Abuse Testing: Pushing to Failure
Power
![]() A FREE Two-Day Event Dedicated to Connected Mobility
A FREE Two-Day Event Dedicated to Connected Mobility
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Automotive
![]() Advantages of Smart Power Distribution Unit Design for Automotive &...
Advantages of Smart Power Distribution Unit Design for Automotive &...
Energy
![]() Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance
Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance