



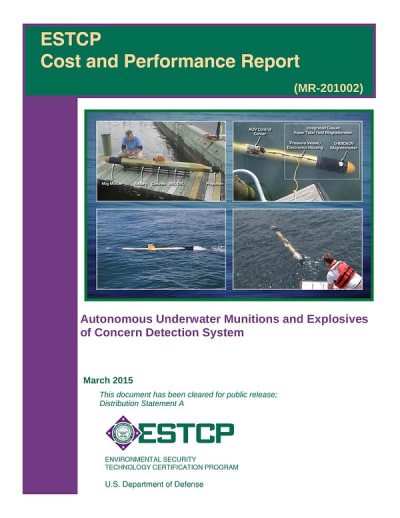
Autonomous Underwater Munitions and Explosives of Concern Detection System
AUV uses a magnetometer to detect dangerous submerged munitions.
The objective of Environmental Security Technology Certification Program (ESTCP) Project MR-201002, Autonomous Underwater Vehicle (AUV) Munitions and Explosives of Concern (MEC) Detection System, was to integrate an untethered and unmanned underwater vehicle with a total field magnetometer for underwater munitions detection and upgrade magnetic noise compensation software to reduce interference from electrical and dynamic influences such as vehicle heading, pitch and roll.

The integrated AUV MEC Detection System consists of a high sensitivity Geometrics G-880AUV cesium vapor magnetometer integrated with a Teledyne-Gavia AUV and associated Doppler-enabled inertial navigation system, acoustic bathymetric, and sidescan imaging modules. Total field magnetic measurements are recorded with asynchronous time-stamped data logs that include position, altitude, heading, pitch, roll, and electrical current usage. Surveys are performed by using preplanned mission information including speed, height above seafloor or depth, and lane or transect spacing.
Magnetic compensation software was concurrently developed to accept electrical current measurements directly from the Gavia AUV to address distortions from permanent and induced magnetization effects on the magnetometer. Maneuver and electrical current compensation terms can be extracted from the magnetic survey missions to perform post-process corrections.
The AUV MEC Detection System consists of the following primary components: a Teledyne-Gavia model autonomous underwater vehicle, a magnetometer module, and magnetic compensation. The Gavia AUV is a modular underwater robotic system that follows a pre-programmed course, collecting environmental data in situ. Missions are planned using a graphical user interface (GUI) to specify waypoints or survey lines, prescribed depths or altitudes, and desired sensor configurations. The Gavia base vehicle is a mobile sensor platform that can be userconfigured on deck for a particular task or operating condition by the addition of one or more sensor, navigation, or battery modules.
The Gavia AUV is navigated by a Kearfott T-24 “SEANAV” inertial navigation system (INS). While on the surface, a Wide Area Augmentation System (WAAS)-capable Global Positioning System (GPS) in the AUV’s sail provides position fixes to the INS. In addition, when within range of the bottom (< 40 meters [m]), an RD Instruments 1,200 kilohertz (kHz) Workhorse Navigator Doppler velocity log (DVL) measures velocity of the vehicle over the seafloor and provides these measurements to the INS.
The Gavia AUV has a maximum depth rating of 500 m. Additional standard sensors aboard the AUV include speed-of-sound, temperature, salinity (derived), dissolved oxygen, chlorophyll-a, and turbidity, as well as a 900 kHz/1,800 kHz side-scan sonar. Other modules available to the AUV include a sub-bottom profiler, downward-looking camera with strobe, and bathymetric sidescan sonar.

The magnetometer module design schematic is presented in Figure 2. The module flooded section houses the G-880AUV total field magnetometer. The sealed pressure vessel contains the G-880AUV electronics and Applied Physics 539 fluxgate compass (fluxgate). The sensors are interfaced with the magnetometer module circuitry, which is necessary to provide internal electrical power and communication with the vehicle’s control system through the AUV microcontroller “rabbit board.” A relief slot cut in the flooded section is used to facilitate G-880AUV sensor orientation requirements.
The AUV MEC Detection System showed reliable detection of 60 mm mortars and larger munitions at 1.5 m altitudes, and 75 mm projectiles and larger munitions at altitudes over 2 m. Average offsets between the known and measured locations of seed items ranged between 0.7 m and 1.8 m depending on the mission design and is a function of mission planning software. Offsets were less than 0.5 m where survey lines crossed seed item locations.
This work was done by Art Trembanis and Nicole Raineault of the University of Delaware; Val Schmidt of the University of New Hampshire; George Tait and Misha Tchernychev of Geometrics, Inc.; Brian Junck of Weston Solutions, Inc.; and John Kloske of SRI International for the Environmental Security Technology Certification Program. ESTCP-0001
This Brief includes a Technical Support Package (TSP).
Autonomous Underwater Munitions and Explosives of Concern Detection System
(reference ESTCP-0001) is currently available for download from the TSP library.
Don't have an account?
More From SAE Media Group
Aerospace & Defense Tech Briefs
Soft Robotic Fish Swims Alongside Real Ones in Coral Reefs

Aerospace & Defense Tech Briefs
Developing Object Detection Systems for Autonomous Underwater Vehicles
Aerospace & Defense Tech Briefs
Underwater Drone Technology
Aerospace & Defense Tech Briefs
Development and Testing of a New Version of MBUD for Cued Classification of Marine UXO
Aerospace & Defense Tech Briefs
Development of a Vision-Based Situational Awareness Capability for Unmanned Surface Vessels
Tech Briefs
System Helps Drones Detect and Avoid Power Lines
Off-Highway Engineering
Positioning to Centimeter Level Improves Ag Productivity
Aerospace & Defense Tech Briefs
GPS Enabled Semi-Autonomous Robot
Motion Design INSIDER
Self-Navigating Catamaran Can Carry Cargo into War Zones
Aerospace & Defense Tech Briefs
Using Sensor Technology to Combat Legacy Issues in Defense Avionics
Aerospace & Defense Tech Briefs
Applying UUV Advances to Safeguard Harbors and Littoral Waters
Motion Design
Insect-Inspired Motion Sensing
Tech Briefs
Laser-Light-Based Accelerometer

Aerospace & Defense Tech Briefs
Industry Invited to Participate in AeroTech Aerospace and Defense Technical Program
Sensor Technology
RTK and Sensor Fusion for Autonomous Vehicle Navigation & Guidance
Aerospace & Defense Tech Briefs
Mars Rover Electric Motors
Tech Briefs
2025 Award Finalists

Aerospace & Defense Tech Briefs
Localization and Mapping of Unknown Locations with Unmanned Ground Vehicles
Aerospace & Defense Tech Briefs
Robotic Rotational Molding Creates New Opportunities for Military and Aerospace Applications
Aerospace & Defense Tech Briefs
Making Machines Curious
Defense INSIDER
Northrop Grumman Assembles First Manta Ray UUV Prototype
Aerospace & Defense Tech Briefs
Quantum Sensing Atomic Gyroscope

Aerospace & Defense Tech Briefs
Drift Improvement with Reinforcement Training of Inertial Sensors
Sensor Technology
Battlefield Navigation with MEMS

Aerospace & Defense Tech Briefs
The CAN Bus: Driving the Future of Autonomous Military Vehicles
Overview
The document titled "Autonomous Underwater Munitions and Explosives of Concern Detection System," dated March 2015, presents a comprehensive overview of a technology designed to detect underwater munitions and explosives. This system is part of the Environmental Security Technology Certification Program (ESTCP) and aims to address the challenges posed by military munitions in underwater environments.
The report emphasizes the importance of developing effective detection systems to accommodate a wide range of underwater scenarios involving military munitions. It highlights the need for such technologies to support existing and evolving regulatory policies concerning environmental safety and security. The document outlines the technological advancements demonstrated in the Autonomous Underwater Vehicle (AUV) MEC Detection System, which is specifically engineered to identify munitions and explosives of concern in aquatic settings.
The AUV MEC Detection System utilizes advanced sensors and algorithms to enhance detection capabilities, ensuring that it can operate effectively in various underwater conditions. The report details the system's performance metrics, including its accuracy, reliability, and operational efficiency. It also discusses the integration of this technology with existing maritime operations, showcasing its potential to improve safety and reduce environmental risks associated with unexploded ordnance.
Furthermore, the document provides insights into the project's objectives, methodologies, and outcomes, emphasizing the collaborative efforts involved in its development. It serves as a resource for stakeholders interested in environmental security, military operations, and technological innovation in underwater detection systems.
The report concludes by underscoring the significance of the AUV MEC Detection System in enhancing the capabilities of military and environmental agencies to manage underwater munitions effectively. By providing a reliable means of detection, the system aims to mitigate risks to marine ecosystems and human safety, thereby contributing to broader efforts in environmental protection and regulatory compliance.
Overall, this document serves as a vital reference for understanding the advancements in underwater detection technologies and their implications for military and environmental safety. It is approved for public release, ensuring that the information is accessible to a wide audience, including researchers, policymakers, and industry professionals.
Top Stories
INSIDERLighting Technology
![]() Using Ultrabright X-Rays to Test Materials for Ultrafast Aircraft
Using Ultrabright X-Rays to Test Materials for Ultrafast Aircraft
INSIDERDesign
![]() New 3D-Printable Nanocomposite Prevents Overheating in Military Electronics
New 3D-Printable Nanocomposite Prevents Overheating in Military Electronics
INSIDERUnmanned Systems
![]() F-22 Pilot Controls Drone With Tablet
F-22 Pilot Controls Drone With Tablet
INSIDERDesign
![]() F-35 Proves Nuke Drop Performance in Stockpile Flight Testing
F-35 Proves Nuke Drop Performance in Stockpile Flight Testing
INSIDERAR/AI
![]() Algorithms for Autonomous Marine Vehicles
Algorithms for Autonomous Marine Vehicles
INSIDERTest & Measurement
![]() NASA’s Quiet Supersonic Demonstrator Jet Completes First Flight
NASA’s Quiet Supersonic Demonstrator Jet Completes First Flight
Webcasts
Energy
![]() SAE Automotive Engineering Podcast: Additive Manufacturing
SAE Automotive Engineering Podcast: Additive Manufacturing
Aerospace
![]() A New Approach to Manufacturing Machine Connectivity for the Air Force
A New Approach to Manufacturing Machine Connectivity for the Air Force
Software
![]() Optimizing Production Processes with the Virtual Twin
Optimizing Production Processes with the Virtual Twin
Power
![]() EV and Battery Thermal Management Strategies
EV and Battery Thermal Management Strategies
Energy
![]() How Packet Digital Is Scaling Domestic Drone Battery Manufacturing
How Packet Digital Is Scaling Domestic Drone Battery Manufacturing
Automotive
![]() Advancements in Zinc Die Casting Technology & Alloys for Next-Generation...
Advancements in Zinc Die Casting Technology & Alloys for Next-Generation...