



Trebro’s Automated Sod Harvester Deploys Motion Control on Multiple Levels

Automating harvesters started out as a necessary solution to a severe labor shortage in 1990, Trebro Manufacturing states on its website. The Billings, Montana-based manufacturer has been producing turf harvesting machines since 1999, and its automated sod harvesters and entire harvesting process feature self-driving, automated-control functions. The company’s tag line, “The Future of Turf Harvesting,” refers to its position of being the first in the industry to offer automated turf harvesting products.
Trebro’s AutoStack 3 harvester is an automated combine for turf that steers itself while an operator monitors and performs quality control actions when needed. The harvesting process combines several automated control processes.
How the harvester works
The operator sets certain performance controls, turns on the turf cutter and pushes the drive control lever forward. After that, the machine takes over and moves with hydrostatic drive. This type of power transfer system has the advantage, compared to mechanical and electrical drive methods, of being able to provide infinitely variable power availability to deliver more or less torque as needed — without any gear changes.

Once in motion, turf is removed from the ground by the cutter-head blade cutting the turf in two places. An encoder measures the distance between cut points as the AutoStack 3 rolls along the field of turf. Metal fingers pull the cut turf off the ground while it is cut along the sides and move it to a conveyor. Next the cut turf piece is moved along a conveyor belt up to rollers that roll the turf piece similar to a carpet. Proximity sensors and encoders feed position information into a processor to determine where the roll ends and position it to fall onto an accumulating tray. A flap control measures and self-corrects the position of the rolled-up turf to be placed so that it comes out in the same position every time.
The accumulating tray accumulates up to 10 rolls per layer and five to 10 layers. The numbers are determined by the operator before setting out to harvest a field. A stacker head advances and retracts back and forth to achieve the number of rolls desired in a set. This head picks up the full set of rolls of turf with metal spikes and places them on a wooden pallet that is ejected from a pallet repository within the machine. The stacker head also rotates the rolls by 90 degrees every other layer for better stacking.
Once a pallet is loaded with a set of rolls, the palleted rolls are dropped to the ground behind the AutoStack 3 for collection as it moves down the field. A pallet injector reloads the next pallet, and the entire process is repeated.
Customers generally specify the number of square yards per pallet of turf they want, and the operator adjusts the settings to the number of rolls per pallet to achieve that result. The amount is typically between 500 and 900 square yards per pallet.
How AutoStack 3 steers itself

A camera system monitors the front edge of the turf cut. It measures distance, color and depth. Trebro considers this system proprietary, as the camera system guides the AutoStack 3 through the cut and steers the machine. To provide a tight turning radius for such a large machine, the AutoStack 3 turns via two cylinders moving the front half of the machine about a pivot point in the middle of it. This capability saves time on repositioning the harvester when reaching the end of a field and turning back for the next run.
In automatically steering the harvester, the position of the articulation of the front needs to be monitored and the angle deviation from dead center needs to be known with precision in both left and right directions. An ultrasonic sensor was first used by Trebro but found that a more reliable method had to be employed. A Novotechnik RSB 3600 absolute position sensor was selected as robust, reliable and with good accuracy for the application. On the harvester, the sensor measures movement covering 0 to 220 degrees of articulation. The robustness of this sensor is highlighted by its operating temperature range of -22 to +185°F (-30 to +85°C), shock and vibration of 50 and 20 g, respectively, as well as sealed housing to IP67.

Additionally, Trebro uses a pair of RSB 3600 position sensors to track the horizontal and rotational positions of the harvester’s dual-head stacker within 0.25 inch (6.35 mm). The stacker’s angular range is 90 degrees. In general, the RSB 3600 used for this application has ≤ 0.81° accuracy at full scale of 90°. This dual-head feature enables customers to harvest two rows of turf at once. Combined with the capability of cutting “short” 2-x 5-ft rolls, it is a feature that is unique to Trebro harvesters; others just have a single head stacker. The RSB sensors are used on Trebro’s other turf harvester, the TSR, as well.
Another unique feature is Trebro’s cutter head control system that allows an operator to adjust down pressure in a dual manner on a large front roller and the cutter head itself, which is further back. This feature ensures a consistent cut in a section of turf and consistent roll of turf. The harvester is set by the user to electronically control the length of turf cuts up to 6 feet 9 inches.
One area of controls that are synchronized are the fork and injector movement. As the harvester goes through the field and puts layers on a pallet, the machine makes adjustments to get ready for the next pallet set when it is loading the last layer for a particular pallet. A proximity sensor and encoders are employed to read the distance to ground from the proximity sensor, and the encoders track distance travelled as well as the position of some moving parts of the machine. This enables the harvester to “know” how far to drop the full pallet to “kiss the ground.” It also lets the harvester control when to raise the forks back up, when to load a new pallet and when to inject the new pallet onto a platform, all while maintaining the operations of cutting, rolling and start of stacking a new set of rolls.
Role of the operator
So with all this automation, why do these harvesters need an operator? The operator performs a number of functions including starting up and initiating the harvesting machine’s downfield movement, monitoring the machine instruments to ensure it is operating within parameters, monitoring the quality of the harvested turf coming up the conveyor belt and stopping the harvester when the field is completely harvested.
Instead of entirely stopping the harvester if a section of turf is bad and manually removing the bad turf, the operator can override the automated controls and move the accumulator backwards and drop the bad product onto the ground. This can save a lot of time while maintaining the quality level of the turf product sold.
Cole Buechler, service manager for Trebro Manufacturing , wrote this article for Truck & Off-Highway Engineering.
More From SAE Media Group
Sensor Technology
Driverless Forklifts
Sensor Technology
New Products
Test & Measurement Tech Briefs
Digital Measurement




Tech Briefs
Gimbal for Steering Propelled CubeSats
Tech Briefs
New on the Market: April 2022

Automotive Engineering
Cameras Look to Go the Distance
Motion Design
Achieving Automation Conveyor Positioning Accuracy
Photonics & Imaging Technology
Optical Neural Network Could Lead to Intelligent Cameras

Motion Design
New Products

Off-Highway Engineering
Intelligent Machine Control the Focus for Doosan, Komatsu Equipment
Medical Design Briefs
New Products and Services

Photonics & Imaging Technology
Positioning Wafers with Micrometer Precision for PECVD Coating
Medical Design Briefs
Summer 2021 Resource Guide
Motion Design
Automated X-Ray Inspection
Off-Highway Engineering
Stoneridge Innovation Truck Envisions a Digital-vision Future
Autonomous Vehicle Engineering
IMUs Help Deliver the Daily Bread
Tech Briefs
Product of the Month
Off-Highway Engineering
Pumping Up Hydraulic Capabilities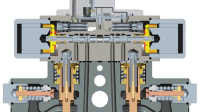
Motion Design
Product Showcase
Off-Highway Engineering
Reshaping the Mobile-hydraulic Ecosystem
Autonomous Vehicle Engineering
Ensuring No Child Left Inside
Top Stories
INSIDERAerospace
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
NewsUnmanned Systems
![]() Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
INSIDERRF & Microwave Electronics
![]() A Next Generation Helmet System for Navy Pilots
A Next Generation Helmet System for Navy Pilots
ArticlesUnmanned Systems
![]() Accelerating Down the Road to Autonomy
Accelerating Down the Road to Autonomy
INSIDERDesign
![]() New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
ArticlesUnmanned Systems
![]() CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
Webcasts
Transportation
![]() Advantages of Smart Power Distribution Unit Design for Automotive...
Advantages of Smart Power Distribution Unit Design for Automotive...
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design...
Quiet, Please: NVH Improvement Opportunities in the Early Design...
Defense
![]() Cooling a New Generation of Aerospace and Defense Embedded...
Cooling a New Generation of Aerospace and Defense Embedded...
Test & Measurement
![]() Battery Abuse Testing: Pushing to Failure
Battery Abuse Testing: Pushing to Failure
Automotive
![]() A FREE Two-Day Event Dedicated to Connected Mobility
A FREE Two-Day Event Dedicated to Connected Mobility