



Tightly Coupled INS, GPS, and Imaging Sensors for Precision Geolocation
This system incorporates image-based navigation techniques with inertial and GPS measurements.
To address the issue of poor georegistration performance for small unmanned aerial vehicles (UAVs), navigation and target-location accuracy improvements achievable by tightly integrating an image-based feature-tracking algorithm with Global Positioning System (GPS) and a consumer-grade inertial navigation system (INS) sensor are being investigated. The image-aiding algorithms add to the solution across a wide variety of terrain types, thus allowing for additional estimates of camera position and orientation in the dynamic adjustment.
After integrating GPS with the image-aided inertial architecture, the system is tested using a combination of Monte-Carlo simulation and flight-test data. The flight-test data was flown over Edwards Air Force Base using representative hardware. The effects of variations in sensor quality and integration methods were investigated and shown to greatly improve the overall performance of the tightly coupled image-aided sensor over the reference GPS/INS sensor.
The method is based on the following assumptions:
- A strapdown inertial measurement unit (IMU) and GPS antenna are rigidly attached to one or more calibrated cameras. Synchronized raw measurements are available from all sensors;
- The inertial, GPS, and optical sensors’ relative position and orientation are known;
- The camera images areas in the environment that contain some stationary objects; and
- A statistical terrain model is available that provides an initial indication of range to objects in the environment.
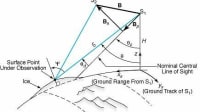
The system parameters consist of the navigation parameters (position, velocity, and attitude), inertial sensor biases, GPS clock bias and drift, and a vector describing the location of landmarks of interest (tn) in the navigation frame. The navigation parameters are calculated using body-frame velocity increment (Δvb) and angular increment (Δθbib) measurements from the inertial navigation sensor, which have been corrected for bias errors using the current filter-computed bias estimates. These measurements are integrated from an initial state in the navigation (local-level) frame using mechanization algorithms.
The position, velocity, and attitude errors were modeled as a stochastic process based on the Pinson navigation error model. The accelerometer and gyroscopic bias errors were each modeled as a first-order Gauss-Markov process, based on the specification for the IMU. The GPS clock drift is modeled as a random bias. The landmarks are modeled as stationary with respect to the Earth. A small amount of process noise is added to the state dynamics to promote filter stability.
Because both the system dynamics model and measurement models are non-linear-stochastic-differential equations, an extended Kalman filter algorithm is employed. The extended Kalman filter is an error-state with feedback formulation that estimates the errors about the nominal trajectory produced by the nonlinear filter dynamics model. In addition, this nominal trajectory serves as the operating point where the nonlinear dynamics and measurement models are linearized. Finally, the feedback nature attempts to constrain the inevitable departure of the nominal trajectory by periodically removing error estimates. This feedback process improves the performance of the extended Kalman filter by reducing linearization errors due to errors in the nominal trajectory.
A Monte Carlo simulation was used to evaluate the performance and stability of the GPS-aided inertial navigation algorithm both with and without image aiding. The simulations were performed using a standard flight profile, based as closely as possible to the experimental flight data. The simulated trajectory was generated based on a semicircular path with no overlapping portions. The trajectory was flown at approximately 1,000 meters above relatively flat terrain.
It was discovered that the algorithm improves the target location accuracy of a UAV equipped with a low-cost GPS/IMU and imaging system. The method is implemented recursively for online operation and only requires a terrain database. No a priori imagery is required over the area of operations. The system automatically selects and tracks stationary features in the field of view and uses these tracks to update the navigation state. The system uses a combination of simulation and flight-test data to improve the attitude accuracy by an order of magnitude. This results in a corresponding improvement in target location accuracy.
This work was done by R. Anderson of the National Geospatial-Intelligence Agency, M. Nielsen of the Air Force Test Pilot School, and M. Veth and F. Webber of the Air Force Institute of Technology. AFRL-0121
This Brief includes a Technical Support Package (TSP).

Tightly Coupled INS, GPS, and Imaging Sensors for Precision Geolocation
(reference AFRL-0121) is currently available for download from the TSP library.
Don't have an account?
More From SAE Media Group
Aerospace & Defense Tech Briefs
Fusion of Image- and Inertial-Sensor Data for Navigation

Photonics & Imaging Technology
Researchers Use Inkjet Printing to Make a Portable Multispectral 3D Camera
Aerospace & Defense Tech Briefs
Drift Improvement with Reinforcement Training of Inertial Sensors

Tech Briefs
Compact 3D LiDAR Imaging System
Off-Highway Engineering
Positioning to Centimeter Level Improves Ag Productivity
Tech Briefs
Vision-Based Approach and Landing System (VALS)
Sensor Technology
Battlefield Navigation with MEMS

Tech Briefs
Laser-Light-Based Accelerometer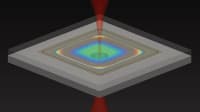
Tech Briefs
Robot Reads Braille Twice as Fast as Humans


Aerospace & Defense Tech Briefs
Miniature Rotorcraft Flight Control Stabilization System
Photonics & Imaging Technology
New Products
Autonomous Vehicle Engineering
The Rodney Dangerfield of Automated-Driving Sensors?
Tech Briefs
Approach Makes Unmanned Agents Self-Sufficient
Sensor Technology
RTK and Sensor Fusion for Autonomous Vehicle Navigation & Guidance
Aerospace & Defense Tech Briefs
Indoor Navigation for Unmanned Aerial Vehicles

Aerospace & Defense Tech Briefs
GigE Advanced Imaging Sensor
Aerospace & Defense Tech Briefs
Distributed, Collaborative Human- Robotic Networks for Search, Identify, and Track
Software Tech Briefs
Nonlinear Estimation Approach to Real-Time Georegistration from Aerial Images
Medical Design Briefs
Sensor Uses Computer Vision-Based Optical Strain Technology

Tech Briefs
Ultra-Thin Sensor for Smart Contact Lenses
Aerospace & Defense Tech Briefs
Scaling of Flight Tests of Unmanned Air Vehicles
Aerospace & Defense Tech Briefs
Quantum Sensing Atomic Gyroscope
Overview
The document titled "Tightly-Coupled INS, GPS, and Imaging Sensors for Precision Geolocation" discusses advancements in micro-air vehicles (MAVs) and their integration with navigation and imaging technologies to enhance geolocation accuracy. It highlights the increasing adoption of MAVs by government, police, and military forces due to their real-time surveillance capabilities, which provide significant advantages in operational contexts.
A key focus of the document is the integration of miniaturized autopilot systems that combine inertial navigation systems (INS), Global Positioning System (GPS), and imaging sensors. While these systems offer autonomous flight capabilities, they face challenges, particularly in geolocation performance. The document identifies poor image geolocation as a primary limitation, stemming from large attitude errors associated with low-performance inertial sensors.
To address these challenges, the authors present a tightly-coupled image-aided inertial navigation system designed to operate in GPS-denied environments. This system improves navigation accuracy by automatically detecting and tracking stationary optical features in the environment, significantly reducing attitude errors even with consumer-grade sensors. The document details the integration of GPS with this image-aided architecture and discusses the testing conducted using Monte Carlo simulations and flight data collected over Edwards Air Force Base.
The authors explore various approaches to improve georegistration performance for small UAVs. These include enhancing the quality of inertial and GPS sensors, utilizing previously surveyed reference targets to correct navigation errors, and employing post-flight image registration software to align images with known ground control points. Each method has its advantages and disadvantages, particularly concerning cost, weight, and operational complexity.
The document concludes by emphasizing the importance of integrating advanced sensor technologies to improve the overall performance of MAVs in precision geolocation tasks. The experimental results demonstrate that the tightly-coupled image-aided sensor significantly outperforms traditional GPS/INS systems, showcasing the potential for enhanced geospatial intelligence products.
Overall, the document provides a comprehensive overview of the current state of MAV technology, the challenges faced in navigation and geolocation, and innovative solutions that leverage the synergy between imaging and inertial navigation systems.
Top Stories
INSIDERManufacturing & Prototyping
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
INSIDERManned Systems
![]() FAA to Replace Aging Network of Ground-Based Radars
FAA to Replace Aging Network of Ground-Based Radars
NewsTransportation
![]() CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
NewsSoftware
![]() Accelerating Down the Road to Autonomy
Accelerating Down the Road to Autonomy
EditorialDesign
![]() DarkSky One Wants to Make the World a Darker Place
DarkSky One Wants to Make the World a Darker Place
INSIDERMaterials
![]() Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Webcasts
Defense
![]() How Sift's Unified Observability Platform Accelerates Drone Innovation
How Sift's Unified Observability Platform Accelerates Drone Innovation
Automotive
![]() E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
Power
![]() Hydrogen Engines Are Heating Up for Heavy Duty
Hydrogen Engines Are Heating Up for Heavy Duty
Electronics & Computers
![]() Advantages of Smart Power Distribution Unit Design for Automotive...
Advantages of Smart Power Distribution Unit Design for Automotive...
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design...
Quiet, Please: NVH Improvement Opportunities in the Early Design...