



Scaling of Flight Tests of Unmanned Air Vehicles
Computer simulations and even ground hardware tests can supplement flight testing.
A program of research has addressed a methodology of scaling of flight tests of unmanned air vehicles (UAVs) intended primarily for military use in observing and/or attacking targets on the ground. The main goal of this research is to make it possible to design a model UAV that is suitable for evaluating the performance of a given real UAV or family of UAVs. This research also demonstrates the use of results of computational simulations and ground hardware experiments on models of vehicles other than UAVs to predict performances of UAVs prior to conducting flight tests.

In the development of UAVs, as in many other engineering endeavors, testing of models offers obvious advantages of economy and safety over testing of fullsize systems, provided that, for a given UAV or other system, it is possible to establish the necessary mathematical relationships for scaling of dimensions and other physical quantities. The mathematical basis for scaling in the present methodology is the Buckingham pi theorem, which was introduced by E. Buckingham in 1914 and is a key theorem in dimensional analysis. For a given physical system, the Buckingham pi theorem provides a means of computing groups of dimensionless parameters (usually represented by symbols that include the eponymous Greek letter pi) from the given physical variables, even if the form of the dynamical equation of the system is unknown. For the purpose of the theorem, two systems (e.g., a model and the system being modelled) for which the dimensionless parameters coincide are said to be similar; they are equivalent for the purpose of the equation.
In order for a model of a UAV to be suitable for evaluating the performance of the real UAV, the two versions of the UAV must have dynamic similarity in the sense that there is a match between the groups of dimensionless variables ("pi groups") of the two versions. Dynamic similarity is shown by using the Buckingham pi theorem to replace the dimensional physical parameters with dimensionless products and ratios. Heretofore, often it has been seen that once a scale model is developed, either (1) it is necessary to modify the fullsize vehicle to match the pi groups of the scale model, or (2) the pi groups of the scale model are such as to afford similarity to only a certain subset of UAVs. The concern in the present research is to overcome these limitations, enabling development of a model that can afford the full range of dynamic similarities for a general UAV.
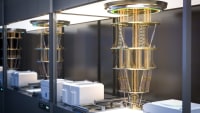
Thus far, the research has included investigations of the scaling of flight and sensor dynamics between two surrogate vehicles and a basic UAV that could be used to search wide areas. One surrogate vehicle was a 1/20-scale model of a mammoth dump truck; the other was a Chinese-built jet airplane used for training pilots (see figure). The Buckingham pi theorem was applied to the governing equations of the UAV/sensor system under simplifying assumptions (ignoring wind, friction, and aerodynamic loads) flying over a rectangular ground area. The vehicle dynamics and sensor behavior were studied to develop seven pi groups. Computational simulations of the three vehicles were performed and the results of the simulations were compared to study the possibilities and effects of scaling.
This work was done by Jeevani I. Abeygoonewardene of the Air Force Institute of Technology for the Air Force Research Laboratory. For more information, download the Technical Support Package (free white paper) at www.defensetechbriefs.com/tsp under the Physical Sciences category. AFRL-0036
This Brief includes a Technical Support Package (TSP).
Scaling of Flight Tests of Unmanned Air Vehicles
(reference AFRL-0036) is currently available for download from the TSP library.
Don't have an account?
More From SAE Media Group
Motion Design INSIDER
Computer Simulation Accurately Models Moving Cars
Aerospace & Defense Tech Briefs
Robust Quantum Sensors Program
Automotive Engineering
Engineering at the New NVH Frontier


Aerospace & Defense Tech Briefs
Industry Invited to Participate in AeroTech Aerospace and Defense Technical Program
Aerospace & Defense Tech Briefs
SAE International Extends Call for Abstracts, Seeks Submissions for AeroTech Conference
Aerospace & Defense Tech Briefs
New Method to Measure Wind Speed Could Unlock Drones’ Potential
Automotive Engineering
Emulating 5G Networks for AV Testing
Aerospace & Defense Tech Briefs
Physicists Measure a Key Aspect of Superconductivity in ‘Magic-Angle’ Graphene
Electronics & Sensors INSIDER
New Atom-Based Thermometer Measures Temperature More Accurately
Electronics & Sensors INSIDER
Careful Heating Unlocks Unprecedented Sensitivity to Pressure in Semiconductor Materials
Tech Briefs
Thin Film Sensor for Ultra High-Temp Measurement

Tech Briefs
Victim Simulator for Victim Detection Radar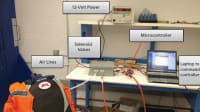
Tech Briefs
AI Helps UAVs Predict Oncoming Turbulence
Electronics & Sensors INSIDER
Researchers Demonstrate a High-Speed Electrical Readout Method for Graphene Nanodevices
ADAS & Autonomous Vehicle Engineering
The Road to Zero Prototypes
Aerospace & Defense Tech Briefs
Sensuron Enables Real-Time Structural Health Monitoring Onboard NASA’s X-56 UAV
Aerospace & Defense Tech Briefs
Centre for Modelling & Simulation to Develop Digital Twins for GKN Aerospace Additive, Composite, and Industry 4.0 Technologies
Motion Design INSIDER
Friction That Cools
Automotive Engineering
Sharper Testing Delivers Better AV Performance
Off-Highway Engineering
Addressing Electromagnetic Compatibility in the Context of Aircraft Electrification
Autonomous Vehicle Engineering
New Digital Tools Driving Restructuring for Autonomy
Automotive Engineering
Accelerating Racecar Innovation
Air Force Research Laboratory Technology Horizons
Coordination of Autonomous Unmanned Air Vehicles
Power Electronics INSIDER
Diamond Quantum Imaging Can Enable Next-Gen Power Electronics
Tech Briefs
Analytical Model Evaluates Battery Capability
Overview
The document is a Master's thesis titled "Scaling Flight Tests of Unmanned Air Vehicles" authored by Captain Jeevani I. Abeygoonewardene at the Air Force Institute of Technology. It addresses the increasing technological advancements and research interest in unmanned air vehicles (UAVs), emphasizing the necessity for safe, cost-effective, and efficient methods to experiment with their flight performance and surveillance capabilities.
The thesis begins by outlining the motivation behind the research, which stems from the need for standardized experimental guidelines for UAVs, as existing methods are often based on commercially available equipment and lack a connection to real-world systems. The author reviews previous work in related fields, including mobile robots and wind tunnels, and discusses the importance of dimensional analysis in fluid mechanics, particularly the Buckingham Pi theorem, as a foundation for developing experimental scaling guidelines.
The research aims to establish a framework for experimental scaling of flight tests, allowing for the use of computer simulations and ground hardware experiments to evaluate UAV performance before actual flights. The author presents a detailed analysis of flight and sensor performance characteristics, comparing a nominal wide search area vehicle with two surrogate hardware systems that exhibit varying operational characteristics. This comparison is crucial for understanding how different designs and configurations can impact UAV effectiveness.
The document is structured into several chapters, including an introduction that sets the stage for the research, a problem setup and definitions section that clarifies key concepts, and a methodology chapter that elaborates on the analytical techniques employed. The findings contribute significantly to the field by providing a systematic approach to scaling experiments, which can enhance the reliability and applicability of UAV testing.
In conclusion, the thesis not only highlights the challenges faced in UAV research but also offers valuable recommendations for future studies. It underscores the importance of developing standardized experimental protocols to ensure that UAVs can be effectively tested and evaluated, ultimately contributing to advancements in autonomous operations and surveillance capabilities. The work is a significant step toward bridging the gap between theoretical research and practical application in the field of unmanned aerial systems.
Top Stories
INSIDERManufacturing & Prototyping
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
INSIDERManned Systems
![]() FAA to Replace Aging Network of Ground-Based Radars
FAA to Replace Aging Network of Ground-Based Radars
NewsTransportation
![]() CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
NewsSoftware
![]() Accelerating Down the Road to Autonomy
Accelerating Down the Road to Autonomy
EditorialDesign
![]() DarkSky One Wants to Make the World a Darker Place
DarkSky One Wants to Make the World a Darker Place
INSIDERMaterials
![]() Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Webcasts
Defense
![]() How Sift's Unified Observability Platform Accelerates Drone Innovation
How Sift's Unified Observability Platform Accelerates Drone Innovation
Automotive
![]() E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
Power
![]() Hydrogen Engines Are Heating Up for Heavy Duty
Hydrogen Engines Are Heating Up for Heavy Duty
Electronics & Computers
![]() Advantages of Smart Power Distribution Unit Design for Automotive...
Advantages of Smart Power Distribution Unit Design for Automotive...
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design...
Quiet, Please: NVH Improvement Opportunities in the Early Design...