



Indoor Navigation for Unmanned Aerial Vehicles
Low-cost range sensors solve mapping and localization problems confronting UAVs.
This research proposed the use of inexpensive, lightweight range sensors for indoor unmanned aerial vehicle (UAV) navigation. Two potential range sensors were tested for suitability and error characteristics. The SHARP infrared range sensors provide a narrow beam and a higher resolution distance measurement, at the expense of de creased range (approximately 150–180 cm maximum). The MaxBotix® EX1™ ultrasonic range sensors had a longer range (up to 6.45 m) and a wider beam.
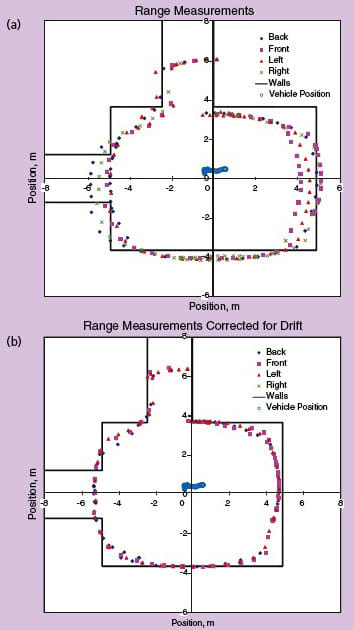
Similar effects were observed when the sensors were aimed at the corner of a room. Thus, the sonar range sensors return the same distance regardless of moderate changes in angle to the target. This makes them useful for altitude ranging, as the vehicle roll and pitch do not greatly affect the distance measurement to the ground. The sonar are less useful for scanning a room to make a 2D plot of the room, although by using a histogram analysis, room dimensions were determined from experimental sonar data. In addition, simulations were performed using sonar and the histogram analysis to determine room dimensions in real time. The addition of a yaw-rate gyro was simulated, which, along with wall-following behavior to correct for drift, could allow a heading estimate to be maintained during the flight as well. With a heading estimate and the combination of sonar and IR sensors for ranging, a small, passively stable aerial platform could be used for basic mapping and localization.
Once the range sensors were analyzed, and their measurement and error characteristics were determined, simulations were completed to develop and refine mapping and localization techniques using the low-cost range sensors. Finally, a two-phase flight test program was initiated to further develop navigation, guidance, and control algorithms. During the first phase of the flight test, altitude control and longitudinal control were demonstrated. During the second phase of the flight test program, heading control and lateral control were developed. The completion of the flight test program demonstrated the capability to navigate unknown indoor environments using only simple, ultra-low-cost range sensors mounted to a passively stable coaxial rotorcraft vehicle.
This work was done by D. Michael Sobers, Jr., Girish Chodhary, and Eric N. Johnson of Georgia Institute of Technology. For more information, download the Technical Support Package (free white paper) at www.defensetechbriefs.com/tsp under the Physical Sciences category. GIT-0001
This Brief includes a Technical Support Package (TSP).
Indoor Navigation for Unmanned Aerial Vehicles
(reference GIT-0001) is currently available for download from the TSP library.
Don't have an account?
More From SAE Media Group
Aerospace & Defense Tech Briefs
Scaling of Flight Tests of Unmanned Air Vehicles
Tech Briefs
AI Helps UAVs Predict Oncoming Turbulence
Aerospace & Defense Tech Briefs
Simultaneous Vibration Suppression and Energy Harvesting


Aerospace & Defense Tech Briefs
The Altair/Predator B: An Earth Science Aircraft for the 21st Century
Aerospace & Defense Tech Briefs
Characterization of a MEMS Directional Sound Sensor
Photonics Tech Briefs
Multiple-Zone Diffractive Optic Element for Laser Ranging Applications

Tech Briefs
Rule-Based "Intelligent" Monitoring Software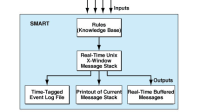
Tech Briefs
Measurements of Radiation in the Atmosphere
Battery & Electrification Technology
Examining EV Battery Thermal Management
Aerospace & Defense Tech Briefs
Miniature Rotorcraft Flight Control Stabilization System

Aerospace & Defense Tech Briefs
This Laser Clock Could Transform Satellite Navigation Accuracy

Tech Briefs
Seed-Wing Flyers for Exploration
Aerospace & Defense Tech Briefs
Bi-Axial Vibration Energy Harvesting



Tech Briefs
Solar-Powered Airplane With Cameras and WLAN
Tech Briefs
Self-Cleaning Coatings for Space or Earth
Battery & Electrification Technology
Next-Generation Binder for Lithium-ion Batteries

Photonics & Imaging Technology
Researchers Use Inkjet Printing to Make a Portable Multispectral 3D Camera
Tech Briefs
Ultrasonic Profiling of an Object
Tech Briefs
Products of Tomorrow
Aerospace & Defense Tech Briefs
New Drone Will Mimic Albatross Flight
Overview
The document presents research on indoor navigation for unmanned aerial vehicles (UAVs), focusing on the development and testing of a control system and navigation algorithm that allows UAVs to autonomously explore and map unknown indoor environments. The study emphasizes the use of low-cost range sensors, such as sonar and infrared (IR) sensors, to facilitate navigation and obstacle avoidance in complex indoor settings.
The research is structured around two phases of flight testing. In the first phase, an initial avionics system was employed, which included multiple sonar sensors for longitudinal and lateral ranging, an altitude sonar, and IR sensors for heading estimation. The data from these sensors were processed on the ground, allowing for manual control of the UAV during initial tests. The results highlighted the need for independent operation of sonar sensors to avoid interference, leading to a recommended sampling strategy that improved the update rate for altitude measurements.
The second phase involved more advanced testing, where the UAV was flown in a controlled environment, specifically the IARC arena, to navigate a maze autonomously. The flight tests began with manual takeoff, followed by the activation of an altitude control loop, which was tuned for optimal performance. Once altitude control was established, the yaw, longitudinal, and lateral control loops were adjusted to ensure satisfactory navigation capabilities. The UAV was able to maintain a desired distance from walls and execute turns within the maze, demonstrating effective guidance logic.
Throughout the testing, the UAV operated with a combination of sensors, including a camera for imagery collection, although optical flow methods for velocity measurement were not utilized. The flight tests lasted approximately seven minutes, during which all systems operated simultaneously, showcasing the integration of various technologies.
The findings from this research indicate that UAVs can successfully navigate and map indoor environments using low-cost sensors and robust control algorithms. The study contributes to the field of autonomous navigation, providing insights into sensor integration, control loop tuning, and guidance strategies necessary for effective indoor exploration. Overall, the research highlights the potential for UAVs to operate in complex environments, paving the way for future applications in search and rescue, surveillance, and facility management.
Top Stories
INSIDERManufacturing & Prototyping
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
INSIDERManned Systems
![]() FAA to Replace Aging Network of Ground-Based Radars
FAA to Replace Aging Network of Ground-Based Radars
NewsTransportation
![]() CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
NewsSoftware
![]() Accelerating Down the Road to Autonomy
Accelerating Down the Road to Autonomy
EditorialDesign
![]() DarkSky One Wants to Make the World a Darker Place
DarkSky One Wants to Make the World a Darker Place
INSIDERMaterials
![]() Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Webcasts
Defense
![]() How Sift's Unified Observability Platform Accelerates Drone Innovation
How Sift's Unified Observability Platform Accelerates Drone Innovation
Automotive
![]() E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
Power
![]() Hydrogen Engines Are Heating Up for Heavy Duty
Hydrogen Engines Are Heating Up for Heavy Duty
Electronics & Computers
![]() Advantages of Smart Power Distribution Unit Design for Automotive...
Advantages of Smart Power Distribution Unit Design for Automotive...
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design...
Quiet, Please: NVH Improvement Opportunities in the Early Design...