



Calculation of Weapon Platform Attitude and Cant Using Available Sensor Feedback
Successful development of mobile weapon systems must incorporate operation on sloped terrain.
When firing artillery, there is typically a maximum angle that the platform cannot exceed relative to the Earth plane. This is due to the large recoil forces involved and the risk of destabilizing the platform the weapon is mounted to. Mobile systems are particularly sensitive to this as the attitude of the platform relative to Earth is constantly changing. A simple solution is to add pitch and roll sensors directly to the platform. However, many mobile systems already have an assortment of sensors that can be used to calculate the platform attitude.
U.S. Army weapon systems are designed to be deployed and operated wherever a need arises. This design requirement necessitates operation on a myriad of terrain types. This includes hills, mountains and ravines — locations where level ground is rare or unavailable. It follows that successful development of mobile weapon systems must incorporate operation on sloped terrain.
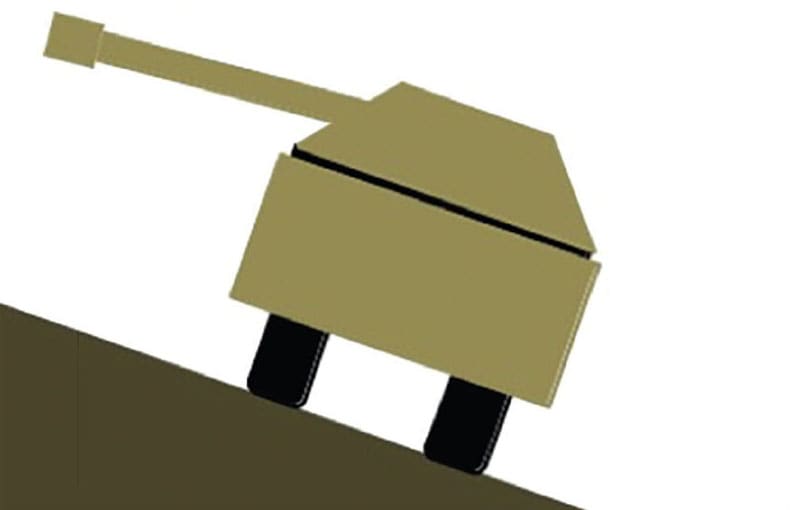
Sloped terrain presents challenges for firing large caliber weapons. When a weapon is fired, the forward momentum of the discharge is equally reflected to the weapon in the form of a recoiling impulse. That recoiling force can be minimized via a recoil system, which applies a lesser counter force over a calculated distance to spread the impulse over a greater period of time. However, even with sophisticated recoil systems, large caliber guns can impart significant forces into the weapon mount and, subsequently, the weapon platform. The figure below illustrates a large platform cant combined with a low firing angle tangential to that cant. Firing in this configuration could destabilize the platform, resulting in a vehicle rollover.
Sloped terrain can also impact non-firing operations. Traversing on a level platform requires force to accelerate the inertia of the mass and overcome any frictional losses. When canted, a gravitational component is added. That additional load increases with the cant angle and is reflected to the traversing mechanism requiring additional force to overcome. There are also instances when cant must be minimized in order to perform certain maintenance procedures, such as boresighting the gun tube.
Due to the challenges presented by operation on uneven terrain, determination of the weapon cant is essential. Computer controlled indirect weapon systems typically have an attitude sensing device that is aligned to the gun tube and enables precise pointing of the weapon. This device provides the attitude of the gun tube relative to Earth using a series of rotations (yaw, pitch, and roll) called Euler angles. In addition, these systems often incorporate sensors to indicate the angles of the traversing and elevating actuators relative to the platform. The weapon attitude and actuator sensor data can be used to calculate the attitude of the platform relative to Earth, as well as the maximum cant and heading values.
This work was done by Joshua Stapp for the Army Armament Research, Development and Engineering Center. ARDEC-0001
This Brief includes a Technical Support Package (TSP).
Calculation of Weapon Platform Attitude and Cant Using Available Sensor Feedback
(reference ARDEC-0001) is currently available for download from the TSP library.
Don't have an account?
More From SAE Media Group
Aerospace & Defense Tech Briefs
Bore Elevation and Azimuth Measurement System (Beams)
Aerospace & Defense Tech Briefs
Influence of Leading-Edge Oscillatory Blowing on Time-Accurate Dynamic Store Separation
Tech Briefs
Laser-Light-Based Accelerometer
Sensor Technology
All-Silicon MEMS Inertial Sensing at Fiber Optic Gyro Performance Levels
Aerospace & Defense Tech Briefs
Investigation of Flight Dynamics and Controls for a Solar-Tracker-Mounted UAV
Motion Design
Insect-Inspired Motion Sensing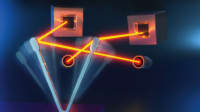
Photonics & Imaging Technology
Ray Optics Simulation of Inertial Navigation Systems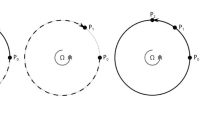
Aerospace & Defense Tech Briefs
Quality Management Experts Provide Guidance on AS9100 Standard, Equipment Calibration

Aerospace & Defense Tech Briefs
SAE International Extends Call for Abstracts, Seeks Submissions for AeroTech Conference

Tech Briefs
Insect-Sized Agile Drones
Aerospace & Defense Tech Briefs
Five Missile-Tracking Satellites Launched
Aerospace & Defense Tech Briefs
6.8 MM Ammunition Production Facility
Aerospace & Defense Tech Briefs
Industry Invited to Participate in AeroTech Aerospace and Defense Technical Program
Motion Design
Built-In Vibration Control to Soundproof Spaces

Aerospace & Defense Tech Briefs
Connected Aircraft Technologies Benefit Manufacturers, Airlines, and Travelers
Aerospace & Defense Tech Briefs
Characterization of Bore Temperatures and Stresses in Small Caliber Gun Barrels
Aerospace & Defense Tech Briefs
Sikorsky’s Autonomous Black Hawk Helicopter Takes Flight
Aerospace & Defense Tech Briefs
Lockheed Martin’s Next-Gen, 360-Degree Vision System Flies on the Bell V-280 Valor

Photonics & Imaging Technology
Precision Motion Control: Six Elements To Consider for Photonics and Optics Alignment Applications


Motion Design
Shape Memory Alloy (SMA)-Enabled ActuatorsAerospace & Defense Tech Briefs
Assessing the Effectiveness of a Combat UGV Swarm in Urban Operations
Aerospace & Defense Tech Briefs
WIAMan
Sensor Technology
A Better Way to Measure Acceleration
Overview
The document titled "Calculation of Weapon Platform Attitude and Cant Using Available Sensor Feedback," authored by Joshua Stapp and published in February 2018, presents a technical exploration of methodologies for determining the attitude and cant of weapon platforms through the use of sensor data. The report is a product of the U.S. Army Armament Research, Development and Engineering Center (ARDEC) and is intended for public release.
The primary focus of the report is to enhance the accuracy and reliability of weapon systems by leveraging available sensor feedback. Attitude refers to the orientation of the weapon platform in three-dimensional space, while cant indicates the tilt or angle of the platform relative to a reference plane. Accurate measurement of these parameters is crucial for effective targeting and operational performance in various military applications.
The document outlines the theoretical foundations and practical applications of sensor integration in weapon systems. It discusses various types of sensors that can be employed, including inertial measurement units (IMUs), gyroscopes, and accelerometers, and how these sensors can provide real-time data to inform the weapon platform's orientation and stability. The report emphasizes the importance of data fusion techniques, which combine information from multiple sensors to improve the overall accuracy of attitude and cant calculations.
Additionally, the report addresses challenges associated with sensor feedback, such as noise, drift, and environmental factors that can affect measurement precision. It proposes solutions to mitigate these issues, including advanced algorithms for data processing and filtering.
The findings and methodologies presented in this report are significant for military engineers and researchers involved in the development of next-generation weapon systems. By improving the understanding of weapon platform dynamics through sensor feedback, the report aims to contribute to enhanced operational effectiveness and mission success.
Overall, this technical report serves as a comprehensive resource for understanding the integration of sensor technology in weapon systems, providing insights into both the theoretical and practical aspects of calculating weapon platform attitude and cant. It underscores the critical role of accurate sensor data in modern military operations and the ongoing efforts to refine these technologies for improved performance.
Top Stories
INSIDERDefense
![]() New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
NewsAutomotive
![]() Ford Announces 48-Volt Architecture for Future Electric Truck
Ford Announces 48-Volt Architecture for Future Electric Truck
INSIDERManufacturing & Prototyping
![]() Active Strake System Cuts Cruise Drag, Boosts Flight Efficiency
Active Strake System Cuts Cruise Drag, Boosts Flight Efficiency
ArticlesTransportation
![]() Accelerating Down the Road to Autonomy
Accelerating Down the Road to Autonomy
INSIDERMaterials
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
Road ReadyTransportation
Webcasts
Electronics & Computers
![]() Cooling a New Generation of Aerospace and Defense Embedded...
Cooling a New Generation of Aerospace and Defense Embedded...
Power
![]() Battery Abuse Testing: Pushing to Failure
Battery Abuse Testing: Pushing to Failure
Connectivity
![]() A FREE Two-Day Event Dedicated to Connected Mobility
A FREE Two-Day Event Dedicated to Connected Mobility
Automotive
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Transportation
![]() Advantages of Smart Power Distribution Unit Design for Automotive &...
Advantages of Smart Power Distribution Unit Design for Automotive &...
Aerospace
![]() Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance
Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance