



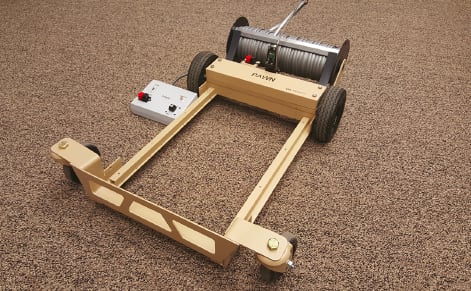
Designing a Robot to Counter Vehicle-Borne Improvised Explosive Devices
The use of Vehicle-Borne Improvised Explosive Devices (VBIED) has increased each year. Current anti-VBIED technology is not only expensive, but requires months or years of training by Explosive Ordinance Disposal (EOD) technicians to operate the equipment. The process of unloading the EOD robot, attaching the detonation wire to the robot, attaching the water charge to the EOD robot, driving the water charge to the VBIED, placing the charge under the vehicle, and then retrieving the EOD robot is a time consuming event. With a typical EOD robot costing $100k - $200k, there is a large financial risk to the EOD team if the robot is damaged or destroyed in the process. WM Robots PAWN was developed to offer the EOD technicians another option in reducing the time needed to neutralize the threat and cost of the operation.

- Low cost, expendable;
- Video for non-Line of Sight (nLoS) operation;
- 500 feet of tethered operation, including control, video transmission, and electronic detonation cable;
- Simple operation, minimal training to operate;
- Operation on semi-improved roads with normal debris;
- Deployment in third world countries.
The overall design philosophy was to minimize the Size, Weight and Power (SWaP) of the system. This was one of the major design challenges in development. Computer modeling of the chassis was utilized to simulate the stresses that would be encountered during operation, and allowed for the final design to be as minimal as possible. The requirement of being expendable dictated that the components used could not pose any additional hazards to the scene. By utilizing in-house rapid prototyping of components, Proof of Concept (PoC) and Prototype testing time was reduced, facilitating a reduced development schedule. The design teams approach was to define and design first the size, then the weight, and lastly the power subsystem.
To determine the final system weight, 3 areas needed consideration: The water charge system weight, the cable assembly, and the frame. A typical water charge contains 5 gallons of water and an explosive charge with a combined weight of approximately 40 lbs and fixes one part of the total system weight that could not be changed. The requirement of tethered operation, with an operational range of 500 feet, sets another part of the system weight. Design options for the cable assembly were completed and the resultant design of the cable assembly and spooling mechanism added another 16 lbs of weight to the system. The chassis design was finalized such that the final weight, with batteries and electronics, was 8lbs, setting the total system weight to 64 lbs.

Design and evaluation of motors was another major design challenge for the team. A wheel diameter of 6" was chosen to give adequate ground clearance, while staying under the 7.5" height requirement. Design calculations showed that, based on terrain, weight, and wheel diameter requirements, that each motor would need a minimum of 21 lbf-in of torque. A suitable motor that meets the torque requirement and with a shaft RPM of 85 was identified. The speed was then calculated to be 1.5 mph, based on motor RPM and wheel diameter. At this speed the time needed to reach the target in a straight line, with an operational range of 500 ft, was calculated to be 3.75 minutes. The design operational time was increased to 15 minutes, to account for obstacle avoidance and nLoS (non-line-of-sight) operations.
The identified motor’s power requirements represented 90% of the total calculated power budget. In order to keep the total power budget to a minimum, the electronics and video camera were designed using low power components.
To address the power source options, the operating parameters needed to be carefully considered. The use of lithium based batteries was not an option, due to the fact that the sysrequirements. A drawback of alkaline batteries, while having a large mAh capacity, is the increased internal resistance over nickel-based or lithium-based batteries. This increased internal resistance limits the amount of power the batteries can supply with a large step increase in current. In order to design within this limitation the design team developed drive controls that ramped up the acceleration over time, reducing the step function of motor current.
Several PoCs (proof of concept) were constructed to evaluate the design parameters and initial calculations. The PoCs demonstrated that the initial design calculations for minimizing SWaP were correct, and that a final design that meets the end-user requirements was viable. Prototypes were then developed and tested on a variety of surface conditions and inclines. Testing showed that the caster steering operated nominally with small to medium debris on a roadway, including small potholes. Alkaline battery life testing under simulated real world scenarios resulted in a 12 - 15 minute runtime, depending on terrain, validating the power calculations. Testing was expanded to using NiMH batteries and resulted in a 15-17 minute runtime, on the same terrain that was used for the Alkaline battery testing. The use of NiMH batteries is an option for the operator, if the situation presents a need for a longer run time. The final design was then field tested and all design criteria were validated.
This article was written by Mark Giacobbe, R&D Manager, WM Robots (Colmar, PA). For more information, Click Here
More From SAE Media Group
Aerospace & Defense Tech Briefs
Design of a Multi-Segmented Magnetic Robot for Hull Inspection
Aerospace & Defense Tech Briefs
Rebar Tying Robot
Aerospace & Defense Tech Briefs
Armored Response Vehicle for Bomb Disposal Teams

Motion Design
Robots Assemble Large Structures from Little Pieces
Aerospace & Defense Tech Briefs
Rear Fuselage Packer
Autonomous Vehicle Engineering
BMW 7-Series Drives Itself Through Own Assembly
Aerospace & Defense Tech Briefs
Digital Twins: How The Digital Replica Concept Is Used By Robotic Systems
Motion Design INSIDER
Tailless Jet Flies Free with Novel Control Technique
Aerospace & Defense Tech Briefs
UAV Fuel Management System

Aerospace & Defense Tech Briefs
Lithium-Ion Batteries
Aerospace INSIDER
Bombardier to Start Building New Army HADES Prototype Spy Plane
Aerospace & Defense Tech Briefs
Industry Invited to Participate in AeroTech Aerospace and Defense Technical Program
Aerospace & Defense Tech Briefs
Rising Star Awards: Women in Engineering Aerospace Winner - Heather Cummings
Aerospace & Defense Tech Briefs
XPONENTIAL 2019 – An AUVSI Experience

Aerospace INSIDER
Navy Completes 73-Hour Nonstop Flight of Solar-Powered UAS


Aerospace & Defense Tech Briefs
Engineering an Aircraft Hydrogen Powertrain

Automotive Engineering
Faurecia Puts the ‘Wow Factor’ in Its Process Technologies
Automotive Engineering
Converting Classic Cars Is Just Step One of This Mission
Automotive Engineering
Engineering Flexibility into EV Powertrains
Aerospace INSIDER
New DARPA X-Plane Will Have No Moving Control Surfaces
Aerospace & Defense Tech Briefs
Remote Weapon Station
Aerospace & Defense Tech Briefs
Soldier-Robot Team Communication: An Investigation of Exogenous Orienting Visual Display Cues and Robot Reporting Preferences
Automotive Engineering
BMW Takes Multi-Modal Route to Manufacturing
Aerospace & Defense Tech Briefs
Connectors Lighten the SWaP Burden in UAV/MUMT Aircraft Electronics
Top Stories
INSIDERManufacturing & Prototyping
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
INSIDERManned Systems
![]() FAA to Replace Aging Network of Ground-Based Radars
FAA to Replace Aging Network of Ground-Based Radars
NewsTransportation
![]() CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
NewsSoftware
![]() Accelerating Down the Road to Autonomy
Accelerating Down the Road to Autonomy
EditorialDesign
![]() DarkSky One Wants to Make the World a Darker Place
DarkSky One Wants to Make the World a Darker Place
INSIDERMaterials
![]() Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Webcasts
Defense
![]() How Sift's Unified Observability Platform Accelerates Drone Innovation
How Sift's Unified Observability Platform Accelerates Drone Innovation
Automotive
![]() E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
Power
![]() Hydrogen Engines Are Heating Up for Heavy Duty
Hydrogen Engines Are Heating Up for Heavy Duty
Electronics & Computers
![]() Advantages of Smart Power Distribution Unit Design for Automotive...
Advantages of Smart Power Distribution Unit Design for Automotive...
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design...
Quiet, Please: NVH Improvement Opportunities in the Early Design...