



Design of a Multi-Segmented Magnetic Robot for Hull Inspection
This flexible, climbing robot could perform hazardous maintenance functions.
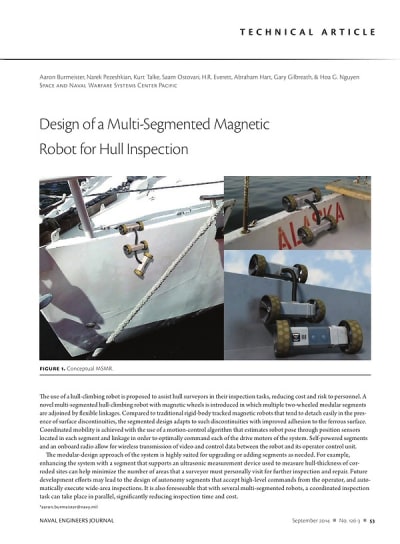
Hull, deck plate, and tank inspection for corrosion, deformation, and fractures is a necessary part of ship maintenance to ensure functional integrity and proper operation of the ship. These inspections are labor intensive, expensive, and often dangerous. A multi-segmented magnetic wheeled robot can assist the surveyors in these tasks.

The Multi-Segmented Magnetic Robot (MSMR) is designed to provide acoustically quiet climbing and turning ability over a typical ferrous hull that often includes discontinuities in the form of protrusions and indentations, especially where hull-plating sections meet. The key to its effective climbing lies in the design of its wheels and the multi-segmented approach. The wheels are designed to provide maximum magnetic adhesion while the multi-segmented body provides surface adaptability.
The MSMR is composed of the robot modules, linkages, and magnetic wheels (Figure1) that provide attraction and traction with the ferrous surface being climbed. The robot modules contain the system electronics, motors, and batteries. The exterior of the robot module protects its contents from water, dust, dirt, and impacts with obstacles. The flexible linkages allow relative motion between robot modules, so the system can turn, negotiate obstacles, and traverse around corners.
Each robot module contains control electronics, drive modules, and a battery (Figure 2). A plastic prototyping machine was used to fabricate the robot module chassis with a polycarbonate ABS blend to achieve a rapid turnaround time.
The magnetic wheel provides the attractive force between the MSMR and the surface it is climbing, allowing the robot to traverse vertical and even inverted surfaces. Two magnetic wheel designs were prototyped and tested. The conformal wheel consists of a high-flex elastomer wheel, radial magnet array, magnet locator, rigid hub, and elastomeric tread. The highly flexible structure of this wheel will allow the wheel to deform so that it flattens somewhat where the wheel contacts the ferrous surface. This flattened portion of the wheel creates a larger surface area of contact, increasing both adhesion force and traction.
The flux-plate wheel consists of an elastomer wheel, two flux-plates, fluxplate locators, rigid hub, and an array of magnets oriented parallel to the central axis of the wheel. The flux-plates direct the magnetic flux of the magnet array through the surface climbed, providing adhesion.

The drive module provides the torque to rotate the wheels and move the robot. The main components are the motor, gearbox, output shaft, housing, motor-shaft shock isolator, and bearings.
The drive module was designed to mitigate the effects of large shock loads when the robot falls and lands on the wheels. If the wheel experiences an impact force, the radial loads are distributed through the output shaft to the drive module housing and back to the robot chassis instead of to the gearbox output shaft.
The linkage, which makes the mechanical connection between the robot modules, must be flexible to allow the robot to turn and maintain wheel contact with the ferrous surface being climbed. It must also be able to transfer push (compressive) and pull (tension) forces between the robot modules so they can work in concert to overcome obstacles greater than the capability of any one robot module.
The electronics are grouped into four major categories: power, processing, sensing, and output. The power group consists of the battery and circuitry to manage and distribute power throughout the system. The processing group consists of the processor, radio, and circuitry to distribute communications. The sensing group includes the wheel encoders, linkage encoders, camera, and future payloads that may be added to gather information. The output group consists of the motors and motor drivers.
This work was done by Aaron Burmeister, Narek Pezeshkian, Kurt Talke, Saam Ostovari, H.R. Everett, Abraham Hart, Gary Gilbreath, and Hoa G. Nguyen of the Space and Naval Warfare Systems Center Pacific. SPAWAR-0005
This Brief includes a Technical Support Package (TSP).
Design of a Multi-Segmented Magnetic Robot for Hull Inspection
(reference SPAWAR-0005) is currently available for download from the TSP library.
Don't have an account?
More From SAE Media Group
Motion Control & Automation Technology
Designing a Multi-Segmented Robot for Hull Climbing
Aerospace & Defense Tech Briefs
Industry Invited to Participate in AeroTech Aerospace and Defense Technical Program
Aerospace & Defense Tech Briefs
Designing a Robot to Counter Vehicle-Borne Improvised Explosive Devices
Aerospace & Defense Tech Briefs
Robotic Rotational Molding Creates New Opportunities for Military and Aerospace Applications
Aerospace & Defense Tech Briefs
SAE International Extends Call for Abstracts, Seeks Submissions for AeroTech Conference
Tech Briefs
Insect-Sized Agile Drones
Motion Design
Square Structural Joint with Robotic Assembly Tool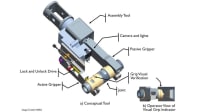

Tech Briefs
2025 Award Finalists
Aerospace & Defense Tech Briefs
Investigation of Flight Dynamics and Controls for a Solar-Tracker-Mounted UAV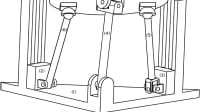
Aerospace & Defense Tech Briefs
AIA Predicts Flying Air Taxis, Supersonic Air Travel, and Space Industry for 2050
Aerospace & Defense Tech Briefs
Testing Military Vehicle Steering Systems
Aerospace & Defense Tech Briefs
Soft Robotic Fish Swims Alongside Real Ones in Coral Reefs
Motion Design
Dynamic Gripper Mimics Adjustable Grip of the Human Hand
Aerospace Manufacturing and Machining INSIDER
Meeting the Demands of Defense Production and Sustainment Through Additive Manufacturing
Tech Briefs
Calibration System for Automated Fiber Placement
Aerospace & Defense Tech Briefs
Laser Cleaner Robot

Aerospace INSIDER
A New Quantum Materials Research System
Aerospace & Defense Tech Briefs
GPS Enabled Semi-Autonomous Robot
Tech Briefs
5 Ws of a Self-Healing Robot

Aerospace & Defense Tech Briefs
A Simpler Method for Learning to Control a Robot


Aerospace & Defense Tech Briefs
New Cyber Algorithm Shuts Down Malicious Robotic Attacks

Tech Briefs
RISING STAR AWARDS 2025 WINNERS ANNOUNCEDAerospace & Defense Tech Briefs
Hybrid Auxiliary Propulsion System
Tech Briefs
Flying Robot Mimics Rapid Insect Flight
Overview
The document discusses the design and development of a multi-segmented magnetic robot intended for hull inspections, as presented in the Naval Engineers Journal in September 2014. The robot is designed to assist hull surveyors in their inspection tasks, aiming to reduce costs and risks associated with personnel involvement in potentially hazardous environments.
The innovative design features multiple two-wheeled modular segments connected by flexible linkages, allowing the robot to adapt to surface discontinuities more effectively than traditional rigid-body tracked magnetic robots. This adaptability enhances the robot's adhesion to ferrous surfaces, which is crucial for maintaining stability during inspections.
A motion-control algorithm is employed to coordinate the mobility of the robot, utilizing position sensors located in each segment and linkage. This system optimally commands the drive motors, enabling precise movement and control. Each segment is self-powered and equipped with an onboard radio for wireless transmission of video and control data to the operator control unit (OCU).
The modular design of the robot allows for easy upgrades and the addition of new segments as needed. For instance, a segment could be integrated to support ultrasonic measurement devices for assessing hull thickness in corroded areas, thereby minimizing the need for surveyors to physically inspect every location. Future developments may include autonomous segments capable of executing high-level commands from operators, facilitating wide-area inspections. The potential for multiple robots to work in coordination could significantly reduce inspection time and costs.
The document also highlights the ongoing development of coordinated control systems to enhance operator control and the need for further maturation of the technology before it can be tested in operational scenarios. The robot's design is particularly promising for maritime interdiction operations and vessel hull and tank inspections, with the potential to improve safety, effectiveness, and efficiency for personnel involved in these tasks.
In summary, this document outlines a significant advancement in robotic technology for maritime inspections, emphasizing the benefits of modularity, adaptability, and potential for autonomous operation, which could transform the inspection process in the naval industry.
Top Stories
INSIDERDefense
![]() New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
NewsAutomotive
![]() Ford Announces 48-Volt Architecture for Future Electric Truck
Ford Announces 48-Volt Architecture for Future Electric Truck
INSIDERManufacturing & Prototyping
![]() Active Strake System Cuts Cruise Drag, Boosts Flight Efficiency
Active Strake System Cuts Cruise Drag, Boosts Flight Efficiency
ArticlesTransportation
![]() Accelerating Down the Road to Autonomy
Accelerating Down the Road to Autonomy
INSIDERMaterials
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
Road ReadyTransportation
Webcasts
Electronics & Computers
![]() Cooling a New Generation of Aerospace and Defense Embedded...
Cooling a New Generation of Aerospace and Defense Embedded...
Power
![]() Battery Abuse Testing: Pushing to Failure
Battery Abuse Testing: Pushing to Failure
Connectivity
![]() A FREE Two-Day Event Dedicated to Connected Mobility
A FREE Two-Day Event Dedicated to Connected Mobility
Automotive
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Transportation
![]() Advantages of Smart Power Distribution Unit Design for Automotive &...
Advantages of Smart Power Distribution Unit Design for Automotive &...
Aerospace
![]() Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance
Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance