



Method for Detecting Planar Surfaces in Outdoor Urban Environments
This method for acquiring building information could be useful in autonomous navigation of unmanned vehicles in urban settings.
The ability to detect and recognize buildings is important to a variety of vision applications operating in outdoor urban environments. These include landmark recognition, assisted and autonomous navigation, image-based rendering, and 3D scene modeling. The problem of detecting multiple planar surfaces from a single image has been solved with this technology.

Image line segments are first located, and then the vanishing points of these segments are determined. Groups of short segments are combined into longer segments while maintaining alignment with the associated vanishing points. Next, the intersections of line segments associated with pairs of vanishing points are used to generate local support for planar facades at different orientations. The plane support points are then clustered using an algorithm that requires no knowledge of the number of clusters or of their spatial proximity. Finally, building facades are identified by fitting vanishing-point-aligned quadrilaterals to the clustered support points. The main contribution of this approach is its improved performance over existing approaches while placing no constraints on the facades in terms of their number or orientation, and minimal constraints on the length of the detected line segments.
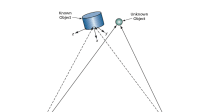
Image line segments that have been labeled according to vanishing point provide an initial cue to segmenting planar regions in the image. Under the assumption that intersecting edges in the scene are coplanar and orthogonal, every pair of nearby, nonparallel, vanishing point-aligned image line segments defines the local surface orientation of the scene point that projects to the segment intersection point in the image. For two local image regions to be images of the same plane, the pairs of intersecting line segments in each of the two regions should be labeled with the same two vanishing points. It was determined to cluster pairs of intersecting line segments that have identical vanishing point label pairs.
Not all pairs of vanishing points define the orientation of a plane that can be easily detected in an image. Vanishing directions that are close to parallel correspond to planes that are highly foreshortened: their normals are nearly perpendicular to the camera line of sight, and their image consists of line pairs that are nearly parallel and very dense. These line segments will be very difficult to accurately detect. Although building facades may occur at these orientations, what is more common is that two nearly parallel vanishing directions correspond to edges on two different, nonparallel planes. Hence, to label the intersections of lines aligned with a pair of vanishing points, the mean angle between their pairs of intersecting line segments must be sufficiently large.
The figure shows additional examples of using the algorithm to detect building facades in urban environments. As shown in these examples, good results were obtained on images of a number of complex buildings. As seen in the figure, not all of the final clusters of plane support points correspond to true building facades. Some clusters correspond to building roofs, some to reflections of building facades in windows, and some clusters correspond to walls inside of buildings. These false facades can easily be filtered out based on their small size when compared to the larger facades that are detected.
This work was done by Philip David of the Army Research Laboratory. ARL-0077
This Brief includes a Technical Support Package (TSP).
Detecting Planar Surfaces in Outdoor Urban Environments
(reference ARL-0077) is currently available for download from the TSP library.
Don't have an account?
More From SAE Media Group


Aerospace & Defense Tech Briefs
Shape-Based Recognition of 3D Objects in 2D Images
Aerospace & Defense Tech Briefs
Comparison of Subpixel Phase Correlation Methods for Image Registration
Tech Briefs
Maximum-Likelihood Template Matching

Tech Briefs
Hybrid Image-Plane/Stereo Manipulation
Tech Briefs
Simple Safe Site Selection (S4) Algorithm
Tech Briefs
Algorithms for Haptic Rendering of 3D Objects

Software Tech Briefs
Memory-Efficient Onboard Rock Segmentation
Tech Briefs
The Spatial Standard Observer
Aerospace & Defense Tech Briefs
Thermal-to-Visible Face Recognition
Software Tech Briefs
Dig Hazard Assessment Using a Stereo Pair of Cameras

Tech Briefs
A Metric for Visual Quality of Digital Video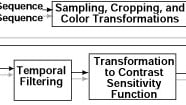
Photonics & Imaging Technology
The New Industrial Edge Ecosystem for Machine Vision
Aerospace & Defense Tech Briefs
New Cyber Algorithm Shuts Down Malicious Robotic Attacks






Photonics & Imaging Technology
Analysis and Simulation of Low-Light INL in CMOS Image Sensors
Aerospace & Defense Tech Briefs
Fusion of Image- and Inertial-Sensor Data for Navigation
Overview
The document titled "Detecting Planar Surfaces in Outdoor Urban Environments" by Philip David, published by the U.S. Army Research Laboratory in September 2008, addresses the critical task of detecting and recognizing buildings in urban settings. This capability is essential for various applications, including landmark recognition, assisted and autonomous navigation, image-based rendering, and 3D scene modeling.
The report focuses specifically on the detection of multiple planar surfaces from a single image, which is a fundamental aspect of building recognition. Each building facade can be conceptualized as a region of a scene plane with a specific position and orientation. By effectively identifying these planar surfaces, the report lays the groundwork for developing systems that can enhance navigation and visualization in urban environments.
The introduction highlights the importance of building recognition in outdoor urban environments, emphasizing its relevance to modern technological applications. The ability to detect planar surfaces is presented as a first step toward creating comprehensive models of urban landscapes, which can be utilized in various fields, including robotics, urban planning, and augmented reality.
The report is structured to provide insights into the methodologies employed for detecting these surfaces, although specific technical details and algorithms are not included in the provided excerpts. The findings are intended to contribute to the broader field of computer vision and machine learning, particularly in the context of urban environments where traditional methods may face challenges due to complexity and variability in building designs.
Additionally, the document includes standard reporting information, such as the report type, dates covered, and organizational details, ensuring that it adheres to formal documentation protocols. It also contains disclaimers regarding the interpretation of the findings and the citation of manufacturer names, clarifying that the report does not represent an official position of the Department of the Army unless specified.
In summary, this report serves as a foundational piece for advancing the detection of planar surfaces in urban settings, with implications for enhancing navigation systems and urban modeling technologies. The research aims to improve the understanding and capabilities of automated systems in recognizing and interacting with complex urban environments.
Top Stories
INSIDERManufacturing & Prototyping
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
INSIDERManned Systems
![]() FAA to Replace Aging Network of Ground-Based Radars
FAA to Replace Aging Network of Ground-Based Radars
NewsTransportation
![]() CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
NewsSoftware
![]() Accelerating Down the Road to Autonomy
Accelerating Down the Road to Autonomy
EditorialDesign
![]() DarkSky One Wants to Make the World a Darker Place
DarkSky One Wants to Make the World a Darker Place
INSIDERMaterials
![]() Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Webcasts
Defense
![]() How Sift's Unified Observability Platform Accelerates Drone Innovation
How Sift's Unified Observability Platform Accelerates Drone Innovation
Automotive
![]() E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
Power
![]() Hydrogen Engines Are Heating Up for Heavy Duty
Hydrogen Engines Are Heating Up for Heavy Duty
Electronics & Computers
![]() Advantages of Smart Power Distribution Unit Design for Automotive...
Advantages of Smart Power Distribution Unit Design for Automotive...
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design...
Quiet, Please: NVH Improvement Opportunities in the Early Design...