



Machines Working Remotely
A new electrohydraulic steering technology offers energy efficiency improvements, increased productivity, enhanced safety, and adaptability to operating conditions, while also providing the capacity to support remote operation of a compact wheel loader.

Remotely operated machines have been researched and developed in various industry sectors including military, automotive, agriculture, aerospace, and construction, to name a few. Remote operation is desired where conditions are deemed too hazardous for human operators to perform, as is the case with explosive mines, radioactive sites, outer space missions, and oil drilling structures. On the other hand, when the nature of the work performed is repetitive and requires less complex decision-making and problem-solving skills, autonomous operation can provide a viable alternative.
Multiple researchers, in both academia and industry, have probed remote and autonomous operation of machines over the past few decades. A tele-operated skid steer loader was developed with two operator-machine interfaces and compared against a manually operated machine. Testing results demonstrated acceptable performance of the first interface employing a laptop computer with a steering wheel. Testing also showed that the operator-machine interface choice was task dependent, and handheld-computer control yielded good results in specific cases only.
Building on that work, researchers investigated different control valve solutions such as spool configurations and pressure compensator effects to yield accurate and smooth control of the valve-controlled machine, in the absence of force feedback to the operator.
Another mobile machine, a front-end wheel loader, was modified by researchers so that it could be operated either remotely at a distance up to 91 m (300 ft) or manually by the operator in the machine. Remote controls included bucket movement, steering, braking, engine speed, and transmission shifting.
Several mobile machines that offer remote and autonomous operation are in series production today, such as John Deere’s RGATOR and Caterpillar’s Command system. Simultaneously, various steer-by-wire technologies that support remote and autonomous operation are being researched and developed, with multiple manufacturers either already offering or in the process of offering steer-by-wire options, albeit valve-controlled steering systems, such as John Deere’s ActiveCommand Steering system.
In this article, researchers from Purdue University investigate a new steering technology’s capacity to support remote operation and demonstrate it on a compact wheel loader, which can be remotely controlled without an operator present behind the steering wheel. This result establishes the new steer-by-wire technology’s capability to enable full autonomous operation as well.
Steer-by-wire system description
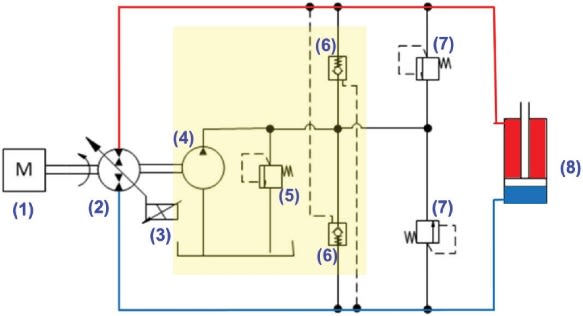
Pump-controlled steering is an electro-hydraulic power steering system, which interprets the operator’s steering wheel inputs and relevant vehicle conditions to adjust the displacement of a variable displacement pump. Figure 1 is provided for identification of components in the proposed circuitry and is dubbed as displacement control (DC).
Actuator (8) velocity is controlled by adjusting the pump (2) speed, displacement, or both. The pump input/output ports are connected to the piston/rod sides of the actuator. The differential fluid flow between the actuator’s uneven sides is overcome by means of pilot-operated check valves (6), which keep the low pressure side of the actuator connected to a low pressure source that can either provide or absorb flow to prevent evacuation.
The low pressure source has its own fixed displacement charge pump (4), driven by the same prime mover (1), providing continuous flow to the cylinder’s low pressure side. The low-pressure level setting is adjusted via a pressure relief valve (5). An accumulator (not shown) could be used to provide high flow rate spikes when sudden high-speed cylinder movements are incurred, if the charge pump flow is not sufficient.
Protection from over-pressurization is via pressure relief valves (7) installed on both sides of the actuator. The pump control system (3) uses a single-stage proportional control valve that meters flow to a double rod actuator coupled to the pump swash plate. The actuator linear displacement determines the angular position of the swash plate and thereby the effective instantaneous pump displacement volume.
The new DC steering system qualifies as by-wire technology given that the signals are transmitted electronically and no physical operator inputs are required to induce steering motion.

Figure 2 shows a top-level layout of the DC steer-by-wire system, in which a control unit inputs the steering wheel angle and rate, vehicle speed, and articulation angle to command the appropriate servo-pump displacement that regulates the flow to the steering actuator, and the desired steering wheel torque that yields a proper feedback level to the operator. The new steering system has been experimentally validated to reduce fuel consumption (-14.5%), increase productivity (+22.6%), and increase fuel usage efficiency (+43.5%).
Pump displacement is controlled with closed-loop position control of the swash plate angle via an angular sensor feedback. The tactile feedback device (TFD) uses a magneto-rheological fluid, whose viscosity changes by varying the magnetic field flux, and outputs a torque level that is linearly proportional to the electrical current input. The TFD also simulates the end of travel stops and it limits the steering wheel velocity to prevent the operator from amply leading the realized articulation motion.
Given that the input signals from the steering wheel are electronic, there is no real need for an operator to be present behind the wheel to steer the vehicle. If the input signals are properly generated by another device, the steering motion can be induced remotely.
Remote operation
Construction, agricultural, and earth-moving machines are under rigorous research and development to investigate the notion of controlling them remotely and/or autonomously. For certain tasks requiring a special skillset, human operators have the knowledge and experience to react to unpredictable situations. For example, uncovering the earth can sometimes pose challenges that require human intervention with decisions that remote or automated systems will not recognize given the superior perception that humans possess over sensory elements that are available today in the market.
On the other hand, many tasks that machines perform have a repetitive, and sometimes mundane, nature that makes them suitable for remote and autonomous operation. This provides fleet operators and end-users the opportunity to cut labor costs by either replacing expert operators with drivers, or provide a safer workplace by completely eliminating operators especially in harsh or dangerous situations.
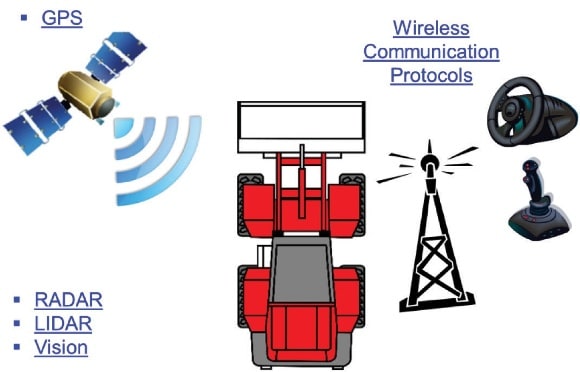
One scenario for implementing remote operation, which has gained favorability in the past decade, is by having a central command station where one or more expert human operators can deploy, monitor, and control multiple machines to perform a certain task or set of tasks.
At the same time, machines that are equipped with appropriate sensors can be programmed to perform certain tasks without real-time control by a human operator. In the case where machines are required to perform precise motion maneuvers, a GPS sensor can be utilized to accurately guide the machine with a precision that can be more superior to that of an expert human operator. The new DC steering technology opens the door for these possibilities, in addition to its other benefits relative to efficiency, productivity, safety, and adaptability.

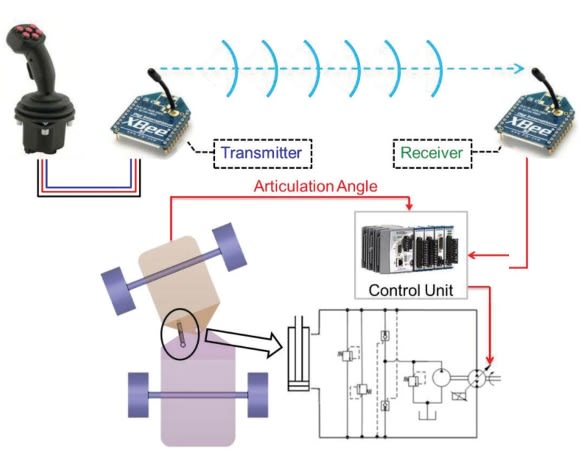
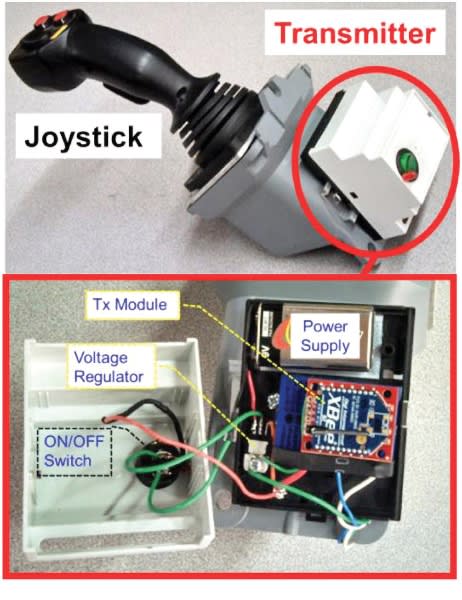
The new DC steering system has been implemented on a prototype test vehicle, a compact front wheel loader. Multiple wireless communication protocols and devices are readily available. For this work, XBee Series 1 modules were selected due to their signal reliability, relative ease of programming and setup, adequate operating range, and reasonable cost given the application on hand.
Two modules are used in a transmitter-receiver fashion to form a wireless data link. An electronic joystick is utilized and its potentiometer analog output is connected to the transmitter module, which performs analog-to-digital conversion. The transmitter broadcasts data, which is picked up by the receiver module paired with the transmitter’s assigned identification and channel numbers.
XBee Series 1 modules do not support analog outputs, but have pulse-width modulation outputs that can be filtered by an electronic resistor-capacitor (RC) circuit to handle the digital-to-analog conversion. A properly designed RC circuit was implemented to have the desired rise time, ripple, and low-pass frequency. The filtered wireless receiver output is fed back to the control unit and is interpreted as a desired velocity command, which is achieved via a feed-forward plus feedback controller.
Velocity control is the preferred scheme for controlling the motion of mobile machinery actuators since hydraulic control valves, as well as servo-pumps, supply a flow rate that corresponds to a velocity. When no joystick input is detected, a transition into position control mode is implemented to hold a desired articulation angle.
Experimental testing

To demonstrate tele-operation of the new DC steering system, the prototype wheel loader articulation motion was controlled via wireless joystick that was actuated by an operator standing at a distance away from the machine. The operator commanded the vehicle to articulate from left to right at a desired rate. The joystick’s maximum tilt angles were mapped to yield the fastest articulation rate, which corresponded to commanding the pump displacement to a maximum (±100%).
To validate the tracking performance of the remote controller, the joystick input, pump displacement, and articulation velocity signals were acquired and plotted. For comparison, the three signals were properly scaled to account for the asymmetry between the steering actuator sides (single-rod) and to incorporate the instantaneous pump (engine) speed.
It should be noted that even though the test results presented here were obtained while the vehicle was stationary, similar results can be obtained while the vehicle travels at higher speeds. The subjective feel of a joystick vs. a steering wheel is then tuned according to the operator’s liking, and that requires force feedback at the joystick interface, which is outside the scope of this article.
The researchers plotted the normalized and scaled joystick input command, pump displacement, and articulation velocity signals. The wireless configuration utilizing the designed velocity control algorithm succeeded at yielding suitable tracking performance, adequate response, and acceptable accuracy. The wireless modules have an indoor range of 30 m (98 ft) and an outdoor RF line-of-sight range of 100 m (330 ft).
Future research

The demonstration of remote steering control on the prototype machine opens the door in front of further research on full-autonomous operation for the entire machine with all working functions included.
Also, application-specific research is on the horizon based on the needs of automotive, agricultural, mining, and earth-moving equipment manufacturers and the sensor technologies available in those specific markets.
At the same time, a deeper look into the new system’s fail-safe and fault tolerance is required to maintain the steering function in the event of a power loss or sensor malfunctioning. Various options are currently under consideration for serving as secondary power sources to provide emergency backup when needed. Simultaneously, a study to analyze the redundancy of essential sensors to keep the system alive and to examine the system’s robustness in the face of sensor faults is required.
This article is based on SAE technical paper 2014-01-2404 by Naseem A. Daher and Monika Ivantysynova, Purdue University.
More From SAE Media Group
Off-Highway Engineering
Reshaping the Mobile-hydraulic Ecosystem
Off-Highway Engineering
‘Electronification’ of Working Hydraulics in Compact Machines

Tech Briefs
Synapse-Like Phototransistor

Motion Design
New Products
Motion Design
Back to Basics: Improving Your Drives Investment
Off-Highway Engineering
Active Vibration Damping for Construction Machines
Motion Design
The Fundamentals of Applying Electrohydraulic Valves
Power Electronics INSIDER
Polyphase Wireless Power Transfer System

Off-Highway Engineering
Yanmar CE Adds to Growing Compact Track Loader Segment
Tech Briefs
Q&A: Charge Wirelessly as You Drive
Off-Highway Engineering
Pumping Up Hydraulic Capabilities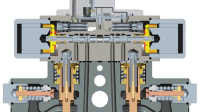
Off-Highway Engineering
New Power Steering Concept Uses Variable Displacement Pump
Sensor Technology
What Will 5G Do for the IoT/IIoT?
Tech Briefs
Pyroelectric Sandwich Thermal Energy Harvester



Aerospace & Defense Tech Briefs
Advanced Satellite Communications Research
Off-Highway Engineering
Rexroth Takes Aim at Electrification for Off-Highway Vehicles
Off-Highway Engineering
Engine Developers Increase Efforts to Decrease Fuel Usage
Automotive Engineering
A Proactive Approach to Hydraulic Health in Class 8 Trucks
Off-Highway Engineering
Hydraulics Still in Control of Off-highway Needs
Off-Highway Engineering
Danfoss and Sany Extend Electrification of Off-Highway Machines
Tech Briefs
Product of the Month
Automotive Engineering
Welcome to the Automotive Engineering Podcast
Electronics & Sensors INSIDER
New Wearable Tech Simulates Realistic Touch
Automotive Engineering
Case Study: Accuracy Is Key in AHP Hydraulics’s New Ball Joint Tester
Top Stories
INSIDERManufacturing & Prototyping
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
INSIDERManned Systems
![]() FAA to Replace Aging Network of Ground-Based Radars
FAA to Replace Aging Network of Ground-Based Radars
NewsTransportation
![]() CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
NewsSoftware
![]() Accelerating Down the Road to Autonomy
Accelerating Down the Road to Autonomy
EditorialDesign
![]() DarkSky One Wants to Make the World a Darker Place
DarkSky One Wants to Make the World a Darker Place
INSIDERMaterials
![]() Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Webcasts
Defense
![]() How Sift's Unified Observability Platform Accelerates Drone Innovation
How Sift's Unified Observability Platform Accelerates Drone Innovation
Automotive
![]() E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
Power
![]() Hydrogen Engines Are Heating Up for Heavy Duty
Hydrogen Engines Are Heating Up for Heavy Duty
Electronics & Computers
![]() Advantages of Smart Power Distribution Unit Design for Automotive...
Advantages of Smart Power Distribution Unit Design for Automotive...
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design...
Quiet, Please: NVH Improvement Opportunities in the Early Design...