



Cooperative Control of Robotic Aircraft
A document reviews a multidisciplinary research program oriented toward development of a rigorous theoretical foundation, and scalable analytical tools and paradigms, for construction of cooperative, networked control for numerous autonomous and semi-autonomous aircraft. This research has addressed issues affecting the design of robust autonomous vehicle systems that could operate in highly uncertain environments, form teams, manage information, and cooperate in deployment, allocation of tasks, and searches. Significant accomplishments are reported in three areas:
Deployment and Task Allocation
Algorithms for deployment of aircraft for surveillance have been developed. The algorithms run in real time aboard the aircraft, routing the aircraft to optimal locations, coordinating among the aircraft, thereby enabling efficient deployment throughout a geographic region.
Verification and Hybrid Systems
Advances have been made in the theory of hybrid input-output automata and in techniques, based on this theory, that enable off-line automatic verification and validation of safety and liveness of cooperative control algorithms.
Information Management for Cooperative Control
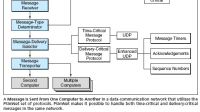
An information theory produced in this research has yielded significant contributions to the design of robust communication protocols featuring cooperative routing schemes that take advantage of network layer diversity and delay adaptation to increase reliability over wireless networks with fading channels.
This work was done by Geir E. Dullerud, P. R. Kumar, Daniel Liberzon, Bruce Reznick and Mahesh Viswanathan of the University of Illinois; Francesco Bullo of the University of California, Santa Barbara; Eric Feron of Georgia Institute of Technology; Emilio Frazzoli, Nancy A. Lynch, Sanjoy K. Mitter, Eytan Modiano, and Pablo Parrilo of Massachusetts Institute of Technology; and Sanjay Lall and John C. Mitchell of Stanford University for the Air Force Office of Scientific Research.
AFRL-0075
This Brief includes a Technical Support Package (TSP).
Cooperative Control of Robotic Aircraft
(reference AFRL-0075) is currently available for download from the TSP library.
Don't have an account?
More From SAE Media Group


Aerospace & Defense Tech Briefs
Automatic Abstraction of Information From Digitized Images
Air Force Research Laboratory Technology Horizons
Coordination of Autonomous Unmanned Air Vehicles

Aerospace & Defense Tech Briefs
Communication Protocol for CyAMS and the Cyber Fighter Associate Interface

Tech Briefs
5G, AI Team Up to Optimize Military Fueling
Software Tech Briefs
Policy-Based Negotiation Engine for Cross-Domain Interoperability


Aerospace & Defense Tech Briefs
One Person Can Supervise a Swarm of 100 Unmanned Autonomous Vehicles
Aerospace & Defense Tech Briefs
Software Virtual Networks Integrate Training and Operation of Wireless Net-Centric Warfare Systems
Aerospace & Defense Tech Briefs
FPGA-Based System for Tracking Digital Information Transmitted Via Peer-to-Peer Protocols
Aerospace & Defense Tech Briefs
Error-Free Data Acquisition and Archival for High-Bandwidth Military Applications
Aerospace & Defense Tech Briefs
Queuing Model for Supervisory Control of Unmanned Autonomous Vehicles


Air Force Research Laboratory Technology Horizons
Intelligence Fusion System Tracks Mobile Targets
Tech Briefs
Universal Decoder for PPM of any Order

Aerospace & Defense Tech Briefs
Real-Time, High-Fidelity Simulation of Autonomous Ground Vehicle Dynamics
Tech Briefs
My Opinion: The IIoT Gave Birth to the IoT

Tech Briefs
Designing Application Software for DSP Chips
Tech Briefs
Fast NRZLM Encoding and Decoding Algorithm

Tech Briefs
Adaptive Behavior for Mobile Robots
Overview
The document presents a comprehensive report on a research initiative aimed at developing a rigorous theoretical foundation and scalable analytical tools for the control of large numbers of autonomous and semi-autonomous air vehicles. This initiative, part of a Multidisciplinary University Research Initiative (MURI), addresses critical reliability and performance issues faced by autonomous vehicle systems operating in uncertain environments.
The primary goal of the research is to enable these vehicles to form teams, manage information, and coordinate operations, including deployment, task allocation, and search missions. The program has produced fundamental theories that facilitate systematic performance analysis, verification, and validation of such systems. Additionally, it has developed algorithms for practical implementation and design software, which are essential for the effective operation of these autonomous systems.
Key advancements highlighted in the report include dynamic deployment strategies, task allocation methods, and improvements in verification processes for hybrid systems. The research also emphasizes information management for cooperative control, which is crucial for the successful operation of multiple vehicles working together.
The document outlines the significant impact of the research on understanding and designing large-scale cooperative Unmanned Aerial Vehicle (UAV) systems. It provides a long-term basis for enhancing capabilities in this field, enabling the systematic construction of robust real-time distributed systems. The research team has received numerous awards and recognitions for their contributions throughout the project, underscoring the importance and relevance of their work.
In summary, the report encapsulates the efforts to advance the field of autonomous vehicle systems through theoretical and practical innovations. It serves as a valuable resource for researchers and practitioners interested in cooperative control, multi-vehicle deployment algorithms, and the validation and verification of complex systems. The findings and methodologies presented in this document are expected to influence future developments in autonomous systems, particularly in applications requiring coordination and collaboration among multiple vehicles in dynamic environments.
Top Stories
INSIDERManufacturing & Prototyping
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
NewsAutomotive
![]() Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
INSIDERAerospace
![]() A Next Generation Helmet System for Navy Pilots
A Next Generation Helmet System for Navy Pilots
INSIDERDesign
![]() New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
ArticlesAR/AI
![]() CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
Road ReadyDesign
Webcasts
Semiconductors & ICs
![]() Advantages of Smart Power Distribution Unit Design for Automotive...
Advantages of Smart Power Distribution Unit Design for Automotive...
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design...
Quiet, Please: NVH Improvement Opportunities in the Early Design...
Electronics & Computers
![]() Cooling a New Generation of Aerospace and Defense Embedded...
Cooling a New Generation of Aerospace and Defense Embedded...
Power
![]() Battery Abuse Testing: Pushing to Failure
Battery Abuse Testing: Pushing to Failure
AR/AI
![]() A FREE Two-Day Event Dedicated to Connected Mobility
A FREE Two-Day Event Dedicated to Connected Mobility