



Automatic Abstraction of Information From Digitized Images
A proposed machine vision architecture would enable automatic learning, adaptation, and generalization.
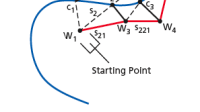
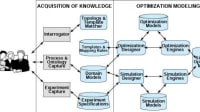
A research effort now underway addresses fundamental mathematical issues involved in a methodology of creating flexible machine vision systems that would be able to modify their behaviors and evolve in particular environments so as to recognize anything that human operators have designated as being "interesting" in those environments. It is intended that a person who is not a programmer could train such a machine vision system by drawing lines around objects in a scene (see figure) or otherwise indicating example objects and that thereafter, the system would adapt and evolve the ability to recognize such objects automatically.

What is sought in this research is a machine vision architecture that supports "point-and-learn" training, works for cluttered scenes, enables adaptation to changes in objects and scenes, and enables adaptation to any scene or environment. In broad terms, it has been proposed, as a basis of this research, that this be a multilevel architecture in which:
- Machine vision systems would evolve appropriate retinal configurations, evolve connectivities to represent spatial relationships, and abstract information to generate their own higherlevel constructs; and
- Levels would be integrated by new relational mathematics as summarized below.
The key feature of the architecture is the ability of a machine vision system to abstract its own constructs from data in a multilevel algebraic representation. This feature enables the system to learn objects that may change through time and to generalize and adapt to learn radically new objects and scenes without the need to change the underlying computer program. The computational demands imposed by the requirement to learn and adapt in this way are beyond the capabilities of any current machine vision systems.
In this research, the approach followed in attempting to satisfy the requirement to learn and adapt is based on the mathematics of multilevel hypernetworks, in which network theory is generalized to multilevel, multidimensional space. Hypernetworks naturally give rise to multilevel systems and provide the essential structural architecture for self-adapting machine vision systems. The fundamental architecture proposed is based on hypernetworks that are inherently relational but can integrate objects with geometrical properties. The hypernetwork representation accommodates relational and numerical data, and supports geometrical operations implemented at high levels of abstraction.
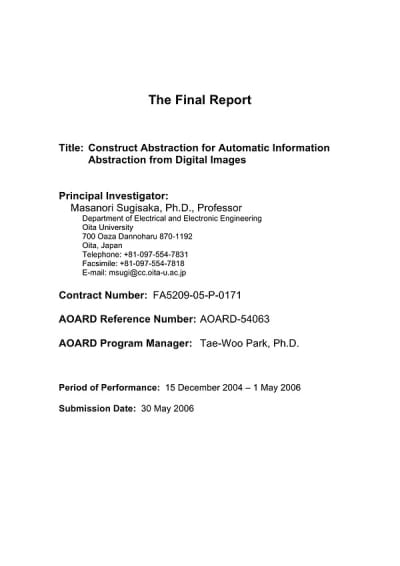
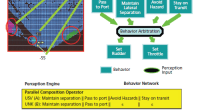
Thus far, the research has led to the identification of both neuronal and algorithmic data processing as being appropriate to an automatic machine vision system having the required capabilities, and to the determination that both types of processing can be integrated coherently. A machine vision system based on the proposed architecture would operate initially in bottom-up fashion, processing from pixels to features. Then intermediate and high-level operators would analyze the geometric and topological properties of the emergent features and would play a role in a dynamic bottom- up/top-down process.
This work was done by Masanori Sugisaka of Oita University for the Air Force Research Laboratory. For further information, download the free white paper at www.defensetechbriefs.com under the Information Sciences category. AFRL-0016
This Brief includes a Technical Support Package (TSP).
Automatic Abstraction of Information From Digitized Images
(reference AFRL-0016) is currently available for download from the TSP library.
Don't have an account?
More From SAE Media Group
Tech Briefs
Adaptive Behavior for Mobile Robots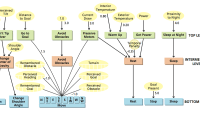
Air Force Research Laboratory Technology Horizons
Coordination of Autonomous Unmanned Air Vehicles


Motion Control Tech Briefs
Navigating a Mobile Robot Across Terrain Using Fuzzy Logic
Tech Briefs
5G, AI Team Up to Optimize Military Fueling

Motion Control Technology
An Architecture for Controlling Multiple Robots
Aerospace & Defense Tech Briefs
New Cyber Algorithm Shuts Down Malicious Robotic Attacks
Robotics & Automation INSIDER
Method Rapidly Verifies That a Robot Will Avoid Collisions
Robotics & Automation INSIDER
A Faster, Better Way to Train General-Purpose Robots
Photonics & Imaging Technology
Total Versatility: Flexible Test Station With a Cobot and Camera
Tech Briefs
Autonomous Environment-Monitoring Networks
Photonics & Imaging Technology
The New Industrial Edge Ecosystem for Machine Vision
Motion Design INSIDER
Physics-Aware Neural Networks Improve Camera-Based Machines
Tech Briefs
Who Knows How Much AI Knows? This Tech Does
Aerospace & Defense Tech Briefs
Shape-Based Recognition of 3D Objects in 2D Images
Motion Control Tech Briefs
Improved Collision-Detection Method for Robotic Manipulator

Overview
The document is a final report titled "Construct Abstraction for Automatic Information Abstraction from Digital Images," authored by Dr. Masanori Sugisaka and Jeffrey Johnson. It details a research project aimed at advancing automatic machine vision, which is crucial for robotics and automated systems. The project was conducted under contract number FA5209-05-P-0171, sponsored by the US Research Laboratory (AOARD/AFOSR), and took place from December 15, 2004, to May 1, 2006.
The report highlights the challenges faced in traditional machine vision systems, which are often hand-crafted for specific applications. These systems tend to be brittle, performing poorly outside their designed parameters and lacking adaptability. The research focuses on developing flexible machine vision systems capable of evolving and modifying their behavior based on the environment. This adaptability allows the systems to recognize objects that an operator identifies as "interesting," thereby enhancing their functionality in dynamic settings.
The report emphasizes the importance of creating machine vision systems that can autonomously learn and adapt, moving beyond the limitations of conventional approaches. The authors discuss various architectural considerations and principles that guide the development of these systems. The goal is to create a more robust and versatile machine vision framework that can be applied across different scenarios, improving the efficiency and effectiveness of automated systems.
The document also includes details about the performing organization, Oita University in Japan, and the collaborative efforts with other institutions, such as the Advanced Research Institute for Science and Engineering at Waseda University. The report is unclassified and approved for public release, making it accessible for further research and development in the field of image processing and machine vision.
In summary, this report presents significant advancements in automatic machine vision, addressing the limitations of traditional systems and proposing a new approach that emphasizes flexibility and adaptability. The findings and methodologies outlined in the report contribute to the ongoing evolution of robotics and automated systems, paving the way for more intelligent and responsive technologies in the future.
Top Stories
NewsRF & Microwave Electronics
![]() Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
INSIDERAerospace
![]() A Next Generation Helmet System for Navy Pilots
A Next Generation Helmet System for Navy Pilots
INSIDERDesign
![]() New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
INSIDERMaterials
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
NewsPower
![]() Ford Announces 48-Volt Architecture for Future Electric Truck
Ford Announces 48-Volt Architecture for Future Electric Truck
ArticlesAR/AI
Webcasts
Electronics & Computers
![]() Cooling a New Generation of Aerospace and Defense Embedded...
Cooling a New Generation of Aerospace and Defense Embedded...
Automotive
![]() Battery Abuse Testing: Pushing to Failure
Battery Abuse Testing: Pushing to Failure
Power
![]() A FREE Two-Day Event Dedicated to Connected Mobility
A FREE Two-Day Event Dedicated to Connected Mobility
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Automotive
![]() Advantages of Smart Power Distribution Unit Design for Automotive &...
Advantages of Smart Power Distribution Unit Design for Automotive &...
Energy
![]() Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance
Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance