



Deep Reinforcement Learning Achieves Multifunctional Morphing Airfoil Control
Smooth camber morphing aircraft offer increased control authority and improved aerodynamic efficiency. Smart material actuators have become a popular driving force for shape changes, capable of adhering to weight and size constraints and allowing for simplicity in mechanical design.
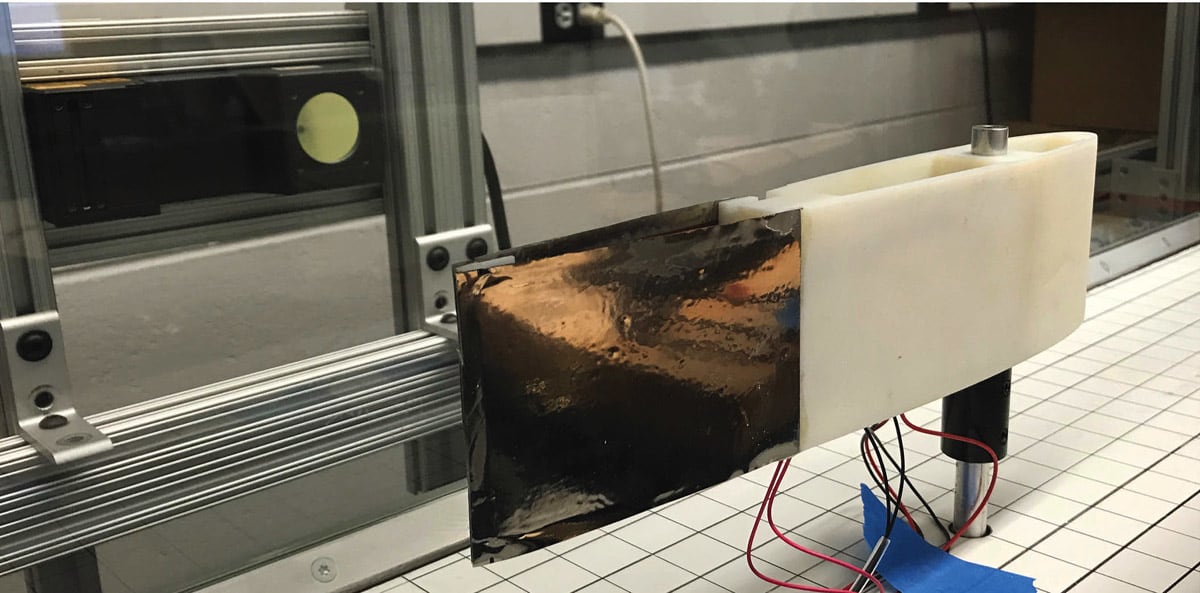
Uncrewed aerial vehicles (UAVs) are growing in popularity for both civilian and military applications, which makes improving their efficiency and adaptability for various aerial environments an attractive objective. Many studies pursue this goal using morphing techniques that incorporate shape changes not typically seen in traditional aircraft. Due to weight and volume constraints consistent with smaller flight vehicles, smart materials, such as macro fiber composites (MFCs), have been used to achieve the desired shape changes. Macro fiber composites are low-profile piezoelectric actuators which have gained substantial attention within the morphing aircraft community. Piezoelectric actuators operate by generating strain when voltage, and hence an electric field, is applied to the electrodes. Piezoelectric actuators are also well known for their capabilities to produce high force-output and a highspeed actuation response. Unlike traditional piezoelectric actuators, which are composed of solid piezoelectric material, MFCs are manufactured using a series of thin piezoceramic rods in a composite laminate layup allowing them to exhibit excellent flexibility while still maintaining the performance benefits attributed to traditional piezoelectric actuators. Furthermore, MFCs exhibit large out-of-plane curvatures when bonded to a thin inextensible substrate, like steel shim, which shifts the structure’s neutral axis. This behavior is attractive for camber morphing airfoil applications and has spurred a large subset of research in the field of morphing aircraft.
Though the field of morphing aircraft is brimming with novel morphing mechanisms, camber morphing wings and airfoils have proven to be especially beneficial due to their ability to increase control authority and improve efficiency. MFC actuators have been widely used in camber morphing wings, in part because they are capable of seamlessly generating cambered actuation allowing them to serve both as the airfoil skin and actuator. Furthermore, the lightweight nature of MFCs and their rapid actuation response are advantageous in UAV applications. Reductions in aircraft weight lead to greater fuel efficiency and rapid actuation allows for greater maneuverability. MFC-driven camber morphing has been applied to several UAV control problems including localized optimization for adverse aerodynamic disturbance and stall recovery, as well as improved efficiency and control effectiveness in roll and pitch for a rudderless aircraft. Finally, pitch and yaw control effectiveness and yaw stability were also demonstrated in an avian-inspired rudderless UAV with a camber morphing MFC tail actuator.
Although MFCs have demonstrated potential for camber morphing applications, they have drawbacks. While piezoelectric actuators generate high force output, the thin and flexible nature of MFCs make them vulnerable to displacement under large out-of-plane forces. As the wings of aircraft are the primary lifting surface, large aerodynamic loads are prone to inducing aeroelastic deformation of MFC-actuated airfoils, reducing the total camber. However, this can be remedied using control algorithms which utilize feedback to tune the actuator’s input voltage such that the desired camber or trailing edge displacement is achieved. Though this has proven successful, the inherent hysteresis of MFCs is a challenging hurdle for traditional control algorithms, many of which are linear by nature. In contrast, deep reinforcement learning (DRL) is well-equipped to manage nonlinear control relationships and may be a promising alternative.
Reinforcement learning (RL) is a means of autonomously achieving control in a manner analogous to that seen in biological systems. Like biological learning, trial and error is used in conjunction with a reward system to meet a specified goal. Each reinforcement learning problem consists of two fundamental parts, the agent, or object of concern whose actions are determined by a learned policy, and the environment in which the agent observes its state and performs actions. A state’s value is measured as the long term expected reward to be received after residing in that specific state. If the state space is large and best represented as continuous, function approximation is used to reduce memory requirements. Artificial neural networks (ANNs) are an effective method for function approximation because of their ability to accurately represent nonlinear functions when trained on large quantities of data. Recent work has combined multi-layered ANNs with RL to create the subfield DRL, which has found remarkable success in many simulated and game-based environments. Success in perfectly controlled environments, such as games and simulations, continues to advance the field; however, there is a growing need to apply the knowledge gained through simulation to robotics and other physical hardware environments.
This work was performed by Kevin P. T. Haughn, Lawren L. Gamble, and Daniel J. Inman for the University of Michigan. For more information, download the Technical Support Package (free white paper) at mobilityengineeringtech.com/tsp under the Aerospace Defense & Technology category. AFOS-0087
This Brief includes a Technical Support Package (TSP).

Deep Reinforcement Learning Achieves Multifunctional Morphing Airfoil Control
(reference AFOS-0087) is currently available for download from the TSP library.
Don't have an account?
More From SAE Media Group

Tech Briefs
Airfoil System for Cruising Flight
Aerospace & Defense Tech Briefs
Simultaneous Vibration Suppression and Energy Harvesting for a Multifunctional UAV Spar
Aerospace & Defense Tech Briefs
Assessment of Noncommercial Icing Prediction Capabilities for Army Applications
Aerospace & Defense Tech Briefs
Preventing Ice Buildup on Electric Aircraft
Motion Design INSIDER
Model Simulates Variable Flap Stiffness for the Best Lift
Aerospace & Defense Tech Briefs
3D-Printed NACA Inlet
Tech Briefs
Algorithms Improve Quadrotor Drone Performance
Aerospace & Defense Tech Briefs
Designing a High-Speed Decoy Unmanned Aerial Vehicle (UAV)
Aerospace & Defense Tech Briefs
MUSHER Demonstrates Manned-Unmanned Aircraft Teaming Applications
Aerospace & Defense Tech Briefs
New Method to Measure Wind Speed Could Unlock Drones’ Potential
Tech Briefs
AI Helps UAVs Predict Oncoming Turbulence
Tech Briefs
Insect-Inspired Drone Deforms Upon Impact
Motion Design INSIDER
AI-Trained Vehicles Can Adjust to Extreme Turbulence on the Fly

Aerospace & Defense Tech Briefs
Autonomous Surveillance Technologies Relating to Dismounted Soldiers

Tech Briefs
University of Colorado Boulder
Tech Briefs
Drones Use Machine Learning to Detect Landmines
Aerospace & Defense Tech Briefs
Autonomous Collaborative Platform

Tech Briefs
Air Traffic Simulation Tool
Motion Design
Variable-Camber Compliant Wing

Aerospace & Defense Tech Briefs
Technology Impact Forecasting for Multi-Functional Composites
Aerospace & Defense Tech Briefs
Simultaneous Vibration Suppression and Energy Harvesting
Tech Briefs
Anti-Phase Noise Suppression Rotor Technologies
Tech Briefs
Sensor Film for Aerospace
Overview
The document discusses the development and evaluation of advanced control systems for multifunctional morphing airfoils, particularly in the context of uncrewed aerial vehicles (UAVs). It highlights the effectiveness of learned controllers, specifically a Model-based Optimized (MO) controller and a Reinforcement Learning (RL) controller, in comparison to traditional Proportional-Derivative (PD) controllers.
The research indicates that both learned controllers demonstrate comparable, and often superior, performance to the PD controller, especially in scenarios where speed and accuracy are critical. The MO controller, in particular, strikes a balance between rapid response and minimal overshoot, making it a promising option for applications in autonomic morphing aircraft that must adapt to unpredictable environments.
The study involved rigorous testing of the controllers using metrics such as rise time, overshoot, and settling time. Results showed that while the RL controller achieved the fastest rise times and highest rewards, it often overshot the target values. In contrast, the PD controller, while smoother and more stable, had longer rise times and lower rewards. The MO controller improved upon the RL's overshoot while maintaining faster response times than the PD controller, showcasing the benefits of an adjusted reward scheme in reinforcement learning.
The document also emphasizes the importance of reward engineering in developing effective controllers. By refining the reward mechanisms, the researchers were able to create a controller that effectively mitigates overshoot while maintaining speed and accuracy. This approach suggests that customization in controller development can lead to solutions tailored to specific control challenges in morphing airfoil systems.
Future research directions are proposed, including the exploration of more complex control objectives beyond simple deflection, such as stall rejection and efficiency optimization. The authors note that while the controllers were validated in hardware, all training was conducted in simulation, indicating a need for real-time learning on physical hardware to achieve truly adaptive control systems.
Overall, the findings underscore the potential of reinforcement learning and advanced control strategies in enhancing the performance of morphing airfoils, paving the way for more sophisticated and efficient UAV designs. The work is supported by funding from the National Science Foundation and the US Air Force Office of Scientific Research, highlighting its significance in the field of aerospace engineering.
Top Stories
NewsSensors/Data Acquisition
![]() Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
INSIDERRF & Microwave Electronics
![]() A Next Generation Helmet System for Navy Pilots
A Next Generation Helmet System for Navy Pilots
INSIDERWeapons Systems
![]() New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
NewsAutomotive
![]() Ford Announces 48-Volt Architecture for Future Electric Truck
Ford Announces 48-Volt Architecture for Future Electric Truck
INSIDERAerospace
![]() Active Strake System Cuts Cruise Drag, Boosts Flight Efficiency
Active Strake System Cuts Cruise Drag, Boosts Flight Efficiency
ArticlesTransportation
Webcasts
Aerospace
![]() Cooling a New Generation of Aerospace and Defense Embedded...
Cooling a New Generation of Aerospace and Defense Embedded...
Energy
![]() Battery Abuse Testing: Pushing to Failure
Battery Abuse Testing: Pushing to Failure
Power
![]() A FREE Two-Day Event Dedicated to Connected Mobility
A FREE Two-Day Event Dedicated to Connected Mobility
Automotive
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Electronics & Computers
![]() Advantages of Smart Power Distribution Unit Design for Automotive &...
Advantages of Smart Power Distribution Unit Design for Automotive &...
Unmanned Systems
![]() Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance
Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance