



JAXA MINERVA-II1 Rovers Achieve Asteroid Landing, Autonomy, Image and Data Capture
MINERVA-II1 rovers land on the surface of an asteroid and achieve first autonomous movement and image capture on asteroid surface.

Japan Aerospace Exploration Agency (JAXA) officials have released the first images from two unmanned rovers that landed safely on the surface of asteroid Ryugu just days ago.


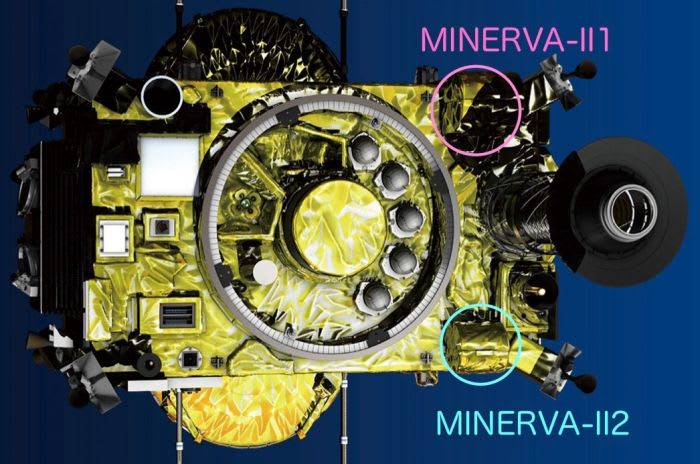
The compact MINERVA-II1 rovers, Rover-1A and Rover-1B, separated from the Hayabusa2 spacecraft on Sept. 21 at 13:06 Japan Standard Time (JST) and landed on Ryugu with a bounce. The two rovers are in good condition and are transmitting images and data, JAXA officials reveal. At least one of the two rovers is moving on the asteroid surface, the data confirms.
MINERVA-II1 is already credited with two milestones: the first mobile exploration robot to land on the surface of an asteroid and achieving the first autonomous movement and image capture on an asteroid surface.
MINERVA-II1 is being called “the world’s first manmade object to explore movement on an asteroid surface,” JAXA officials say.
The two MINERVA-II1 rovers (Rover-1A, 1B) are hexagonal in shape with a diameter of 18 cm, height of 7 cm, and weight of roughly 1.1 kg each. The pair were developed at the JAXA Institute of Space and Astronautical Sciences in collaboration with the following manufacturers, universities, and organizations: Aichi University of Technology, University of Aizu, Addnics Corp., Antenna Giken Co. Ltd, ELNA, CesiaTechno, University of Tokyo, Tokyo Denki University, Digital Spice Corp, Nittoh Inc., Maxon Japan, DLR, and ZARM.
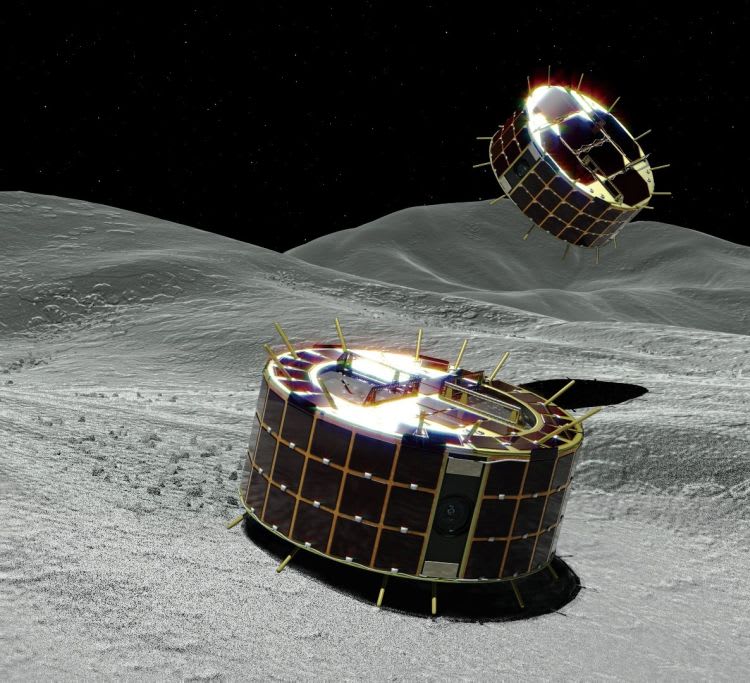
Rover-1A has four cameras, and Rover-1B has three cameras, with which to produce a stereo image of the surface of Ryugu. Projections from the rover edge that look like thorns are temperature sensors to measure the surface temperature of Ryugu. Additional instruments on the rovers include optical sensors, an accelerometer, and a gyroscope.
The rovers communicate with Hayabusa2 using the repeater (OME-E) installed on the main spacecraft. The maximum communication speed is 32 kbps. Data received by Hayabusa is then transferred to the Earth. The OME-E will also be used for communication with the German/French lander, MASCOT, scheduled for deployment in October.
The main feature of MINERVA-II1 is the ability for the rovers to move on the surface of Ryugu by utilizing a hopping mechanism. Within the rover is a motor that rotates and causes the rover to “hop” (jump up) during the rebound, enabling the rovers to move across the asteroid surface and explore multiple areas. On Ryugu, MINERVA-II1 moves autonomously, determining what should be done for the exploration by itself.

Gravity on the surface of Ryugu is very weak, so a rover propelled by normal wheels or crawlers would float upwards as soon as it started to move. The hopping mechanism was adopted for moving across the surface of such small celestial bodies. The rover is expected to remain in the air for up to 15 minutes after a single hop before landing, and to move up to 15 m horizontally.
Courtney E. Howard is editorial director and content strategist at SAE International, Aerospace Products Group. Contact her by e-mail at
More From SAE Media Group
Aerospace & Defense Tech Briefs
NASA Budget Amendment to Help Send Americans to Moon by 2024, Then Mars
Automotive Engineering
JAXA and Toyota Partner, Focus on Future Lunar Mobility
Aerospace & Defense Tech Briefs
NASA Invests in Aerospace Start-Up, University Projects on CubeSat Platform

Aerospace & Defense Tech Briefs
SAE International Extends Call for Abstracts, Seeks Submissions for AeroTech Conference
Aerospace & Defense Tech Briefs
Industry Invited to Participate in AeroTech Aerospace and Defense Technical Program
Off-Highway Engineering
Beep and Bestmile Partner on Self-Driving Fleets in Florida
Aerospace & Defense Tech Briefs
JAXA Launches HTV7 Unmanned Cargo Spacecraft on Resupply Mission to ISS
Aerospace & Defense Tech Briefs
SaraniaSat Wins $5M NASA InVEST Contract for Hyperspectral Thermal Imager
Aerospace & Defense Tech Briefs
Mars Rover Electric Motors
Off-Highway Engineering
WCX 2019: IAMTS Association Will Establish Standardization and Testing for Connected Vehicles

Aerospace & Defense Tech Briefs
New Zealand and LeoLabs Establish the First Low-Earth Orbit Regulatory Platform
Aerospace & Defense Tech Briefs
Air Force Tests Fully Autonomous UAS Control System
Automotive Engineering
Nvidia Partners with AdaCore to Secure Self-Driving Firmware
Aerospace & Defense Tech Briefs
Dragonfly Will Be NASA’s Next Solar System Explorer
Motion Design
Component Helps Perseverance Sample Mars
Aerospace & Defense Tech Briefs
SAE International Launches Aerospace Technology Symposium at Japan Aerospace 2018
Tech Briefs
Rad-Hard Avionics for Moon Rover
Tech Briefs
Mars 2020 – Getting to Mars
Aerospace & Defense Tech Briefs
Stratolaunch All-Composite Aircraft Achieves First Flight
Aerospace & Defense Tech Briefs
Lockheed Martin’s Next-Gen, 360-Degree Vision System Flies on the Bell V-280 Valor
Aerospace & Defense Tech Briefs
SAE International Issues, Revises Technical Reports for Aerospace Engineering
Aerospace & Defense Tech Briefs
Space Docking and Satellite AI Research
Aerospace & Defense Tech Briefs
Japan’s IBUKI-2 (GOSAT-2) Satellite Launches, Powers Up, Completes Critical Phase
Tech Briefs
Cameras Capture Asteroid Debris Retrieval


Top Stories
NewsRF & Microwave Electronics
![]() Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
INSIDERAerospace
![]() A Next Generation Helmet System for Navy Pilots
A Next Generation Helmet System for Navy Pilots
INSIDERDesign
![]() New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
INSIDERMaterials
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
NewsPower
![]() Ford Announces 48-Volt Architecture for Future Electric Truck
Ford Announces 48-Volt Architecture for Future Electric Truck
ArticlesAR/AI
Webcasts
Electronics & Computers
![]() Cooling a New Generation of Aerospace and Defense Embedded...
Cooling a New Generation of Aerospace and Defense Embedded...
Automotive
![]() Battery Abuse Testing: Pushing to Failure
Battery Abuse Testing: Pushing to Failure
Power
![]() A FREE Two-Day Event Dedicated to Connected Mobility
A FREE Two-Day Event Dedicated to Connected Mobility
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Automotive
![]() Advantages of Smart Power Distribution Unit Design for Automotive &...
Advantages of Smart Power Distribution Unit Design for Automotive &...
Energy
![]() Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance
Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance