



Collection, Processing, and Accuracy of Mobile Terrestrial LiDAR Survey Data in the Coastal Environment
Using terrestrial LiDAR scanners coupled with a global position system/inertial navigation system to collect elevation data along the coast can help assess the accuracy of the data.
Monitoring the coastline and its surroundings necessitates frequent sampling and mapping to understand the coastal processes and provide guidance for management decisions. Obstacles include continuous tide and wave influence on the morphology as well as the stability of permanent control monuments. The challenges of mapping and monitoring the coastal terrain given the dynamic nature of the system have evolved over the years, with increased spatial and temporal sampling.

Early techniques relied on repeated, cross-shore transects using a survey transit and level rod. The electronic transit integrated with a distance meter (total station theodolite) increased the number of measurements. This was followed by the development of the satellite-based global positioning system (GPS) and LiDAR units, capable of high point-density, three-dimensional (3D) geospatial data. Also known as laser scanning systems, LiDAR has since been coupled with position and orientation sensors, enabling mobile mapping systems (MMS) utilized on both aerial and terrestrial platforms.
Aerial LiDAR surveys mounted on a helicopter or airplane achieve the greatest spatial coverage but are currently limited in point density when compared to the terrestrial counterpart due to the sampling speed. Aerial surveys are typically more costly, requiring more planning and logistics (e.g., fuel and environmentally favorable conditions). Static, tripod-mounted systems are less expensive and output more detailed maps but are limited in spatial coverage. Mobile terrestrial systems offer a balance between the two aforementioned techniques and are able to provide high-resolution data at lower operational costs while being rapidly deployable.
The use and accuracy of mobile terrestrial systems has been well documented in urban and coastal environments. It serves well to complement airborne LiDAR surveys by resolving more detailed structure such as building sides or foredune faces with the denser point spacing and oblique scanning angles.
Mobile, terrestrial-based LiDAR systems offer the benefits of traditional, stationary high-resolution scanning and given a high-precision navigation system, allow for large regional surveys to be conducted within hours at comparable resolution. The Coastal and Hydraulics Laboratory, Field Research Facility (FRF), utilizes this technology to monitor beach elevation throughout the year on a seasonal scale as well as before, during, and after extratropical, subtropical, and tropical storms or hurricanes. The observational data are critical for understanding spatial and temporal trends of beach morphological evolution within the time scale of a storm event, seasons, years, and ultimately decades. The data can also be used to improve model predictions of coastal inundation and vulnerability during storms, quantify during-storm morphodynamics, monitor beach nourishment projects, and assess large-scale sediment transport and morphology evolution.
A typical mobile survey begins with initialization of the GPS/INS system to acquire stable position, attitude, and velocity data through a series of automated leveling and satellite locking routines. Once there is a signal lock on at least seven GPS satellites and the GPS Azimuth Measurement Subsystem calculates a fixed solution for the two GPS antennas’ separation, the calibration procedure for GPS/INS system can begin. The vehicle operator drives around a calibration site where figure-eight turns and sudden accelerations and decelerations are used to move and level the sensitive gyroscopes contained within the IMU. Once the attitude (roll, pitch, and yaw) accuracy values reach the desired minimum threshold based on the instrument’s precision (0.02 deg for the POS-LV 220 system), the navigation system is sufficiently calibrated to begin field data collection.
LiDAR data are collected at a peak pulse repetition rate of 300 kilohertz (kHz). This results in 122,000 measurements per second with an angular resolution of 0.08° in the vertical along a narrow transect at 90° to the vehicle. As the survey progresses, the surrounding topography is scanned and a 3D point cloud is built from sequential two-dimensional linescans. A typical survey will start with the vehicle positioned parallel to the dune near the dune toe with the scanner pointed orthogonally off the passenger side and scanning offshore. The radar system is also operated while LiDAR scanning.
This work was done by Nicholas J. Spore and Katherine L. Brodie for the Army Engineer Research and Development Center (ERDC). For more information, download the Technical Support Package (free white paper) below. ERDC-0010
This Brief includes a Technical Support Package (TSP).
Collection, Processing, and Accuracy of Mobile Terrestrial Lidar Survey Data in the Coastal Environment
(reference ERDC-0010) is currently available for download from the TSP library.
Don't have an account?
More From SAE Media Group
Aerospace & Defense Tech Briefs
Coastal Lidar and Radar Imaging System (CLARIS) Lidar Data Report
Autonomous Vehicle Engineering
The Rodney Dangerfield of Automated-Driving Sensors?
Photonics & Imaging Technology
This MEMS Scanning Mirror Could Solve LiDAR’s Expensive Autonomous Vehicle Challenges

Automotive Engineering
Honda to Reveal Autonomous Work Vehicle at CONEXPO
Off-Highway Engineering
CES 2024: Aeva Launches 4D Lidar for SAE Level 4 Trucks
Sensor Technology
Better LIDAR in Autonomous Systems Starts with MEMS
Tech Briefs
Compact 3D LiDAR Imaging System

Tech Briefs
Laser-Light-Based Accelerometer
Aerospace & Defense Tech Briefs
Drift Improvement with Reinforcement Training of Inertial Sensors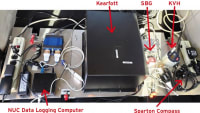

Photonics & Imaging Technology
Bringing Precision Anamorphic Micro-Optics to Consumer-Level Laser Applications
Automotive Engineering
Lumotive’s New LCM Underpins Next-Gen Lidar
Photonics & Imaging Technology
Leap in Lidar Could Improve Safety and Security of New Technology


Tech Briefs
Kodiak 3D LiDAR

Sensor Technology
RTK and Sensor Fusion for Autonomous Vehicle Navigation & Guidance
Autonomous Vehicle Engineering
GM Announces Door-To-Door Ultra Cruise ADAS
Photonics & Imaging Technology
Add LiDAR to ADAS for Pedestrian Safety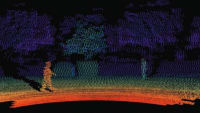
Tech Briefs
Pulsed 2-Micron Laser Transmitter
Off-Highway Engineering
Veoneer Shows Its Latest Safety and AV Tech


Photonics & Imaging Technology
Optical Distance Measurement at Record-High Speed
Photonics & Imaging Technology
Time of Flight vs. FMCW LiDAR Systems
Photonics & Imaging Technology
Automotive Lidar Trends
ADAS & Autonomous Vehicle Engineering
Making Sense of Next-Gen ADAS Sensing
Overview
The document ERDC/CHL TR-17-5 is a technical report from the U.S. Army Engineer Research and Development Center that focuses on the collection, processing, and accuracy assessment of mobile terrestrial lidar survey data in coastal environments. The report outlines the use of advanced lidar technology, which is coupled with a global positioning system (GPS) and inertial navigation system to gather elevation data along coastlines.
The primary objective of the report is to present the current capabilities of the Coastal and Hydraulics Laboratory's mobile terrestrial lidar surveying system. It details the system's components, operational procedures, and methodologies for data acquisition. The report emphasizes the importance of this technology for conducting large regional surveys quickly and with high resolution, which is crucial for monitoring beach elevation changes over time, especially before, during, and after storm events.
The report includes a comprehensive accuracy assessment of the lidar system, revealing a mean horizontal error of 0.075 meters, a mean vertical error of 0.099 meters, and a mean total error of 0.129 meters, with an average repeatability of 0.05 meters. These metrics highlight the system's reliability, although the report cautions against assigning a single accuracy value to the surveys, as spatially variable errors may exist throughout the data collection process.
In addition to accuracy assessment, the report discusses data processing techniques that convert raw lidar data into three-dimensional point clouds, which are essential for creating digital elevation models (DEMs) and other data products. Examples of these products and their applications in coastal management, beach nourishment projects, and sediment transport studies are also provided.
The report concludes with a summary of findings and recommendations for future work, emphasizing the need for further research to incorporate full error propagation in lidar surveys. Overall, this document serves as a valuable resource for understanding the capabilities and applications of mobile terrestrial lidar technology in coastal engineering and environmental monitoring, contributing to improved model predictions of coastal inundation and vulnerability during storm events.
Top Stories
NewsRF & Microwave Electronics
![]() Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
INSIDERAerospace
![]() A Next Generation Helmet System for Navy Pilots
A Next Generation Helmet System for Navy Pilots
INSIDERDesign
![]() New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
INSIDERMaterials
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
NewsPower
![]() Ford Announces 48-Volt Architecture for Future Electric Truck
Ford Announces 48-Volt Architecture for Future Electric Truck
ArticlesAR/AI
Webcasts
Electronics & Computers
![]() Cooling a New Generation of Aerospace and Defense Embedded...
Cooling a New Generation of Aerospace and Defense Embedded...
Automotive
![]() Battery Abuse Testing: Pushing to Failure
Battery Abuse Testing: Pushing to Failure
Power
![]() A FREE Two-Day Event Dedicated to Connected Mobility
A FREE Two-Day Event Dedicated to Connected Mobility
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Automotive
![]() Advantages of Smart Power Distribution Unit Design for Automotive &...
Advantages of Smart Power Distribution Unit Design for Automotive &...
Energy
![]() Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance
Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance