



Ultra-Wide-Band Radar Imaging for Activity Detection
The continuing advancement of semiconductor manufacturing technology to process high-speed UltraWide-Band (UWB) signals has enabled radar technology to become more versatile and applicable to novel applications. Traditionally, radar technology required power-hungry, bulky, and expensive devices. Through the use of low-power UWB technology, a new market for portable battery-driven radars has emerged.
Designing advanced UWB antenna arrays to provide high gain beams to enable penetration through walls or ground and detect motion of a person at large standoff distances is a key ingredient for a sophisticated radar system. Developing an up-and-down converter for the UWB signal to the V-band allows for reduced size and improved lateral resolution for short-range applications such as scanning for concealed weapons on persons. Sense-Through-The-Wall (STTW) radars such as the Eagle45, which can be worn on the body with the radar image observed through a goggle, is just another example of system integration of a sophisticated radar sensor, software, and display.
A UWB radar imager and motion detector developed by TiaLinx has been integrated with a Vertical Takeoff and Landing (VTOL) platform. The VTOL platform enables the radar to be used in difficult-to-access locations such as roofs of tall buildings or on top of collapsed buildings after an earthquake. The systematic scanning from the outside of a building can yield data to construct the internal layout above the first floor. Another application for the VTOL platform is to scan for Unexploded Ordnance (UXO) buried in a dirt road, putting the operator and the scanning device out of harm’s way. The VTOL platform with a hexagonal or quad arrangement for the propellers can have six to eight propellers that, together with sophisticated control software (SW), can be easily flown after a few hours of flight training. The integration of TiaLinx’s UWB radar with a VTOL platform enables the armed forces and law enforcement agencies to readily monitor a potentially threatening situation from a safe stand-off distance.
UWB Impulse Radar

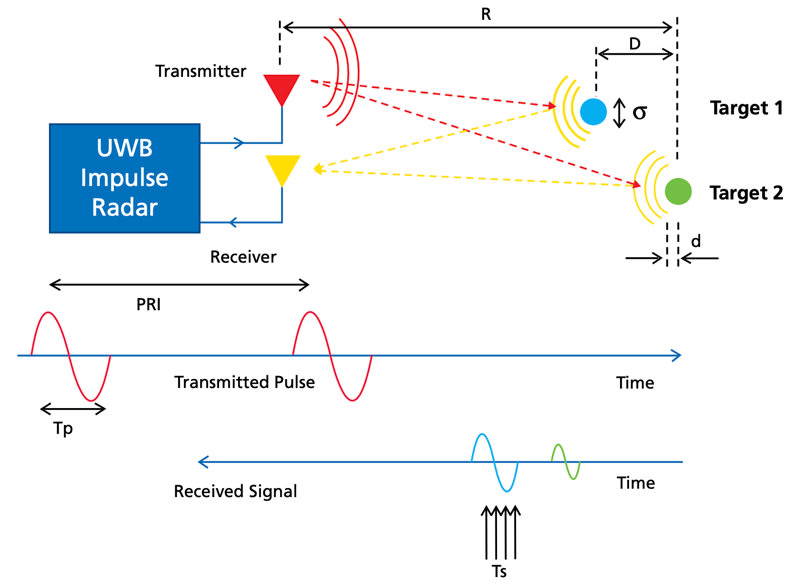
A UWB impulse radar transmits a very short impulse in time (Figure 1), which translates to a UWB signal in the frequency domain. To digitize a UWB signal that is reflected back from a target in a receiver, a very fast analog-to-digital converter (ADC) is required. To ease the burden of having to use a power-hungry and costly high-speed ADC, the method of equivalent sampling is used.
It is based on the principle that the target within a certain time window is stationary. Within this time window, the transmitter sends periodic UWB pulses at a fixed Pulse Repetition Rate (PRF = 1/PRI), which also determines the nonambiguous range R of the radar. The ADC in the receiver samples the received waveform at PRF and advances the sampling instant by very small time increments in the order of picoseconds. It is also possible to average the waveform to increase the SNR. For example, by sampling the waveform 1000 times at the same sampling instant, a 30-dB SNR advantage is obtained.
The equivalent sampling method allows for extremely high sampling rates in the range of tens of gigasamples per second. This translates to a spatial resolution d of millimeters and is the reason why it is possible to detect the breathing of a human. In fact, it is also possible to detect the heartbeat; when the heart pumps, it moves the chest cavity by a millimeter. The radar transmitting the UWB pulses in a periodic manner detects the slightest movement by monitoring the difference between successive scans. So, even if a person is hiding and is motionless in a compound, it is possible to detect his or her breathing rate through walls or roofs.
Phoenix40

The Phoenix40 is a lightweight un - manned air vehicle (UAV) that can fly several hundred feet up into the air carrying a payload of up to 3 pounds. The Phoenix40 is based on a VTOL platform that can be manually controlled or programmed to fly or land automatically to predetermined waypoints. The Phoenix40A can be equipped with Flight of View (FOV) cameras that can relay video images in real time back to the ground station for Non-Line-of-Sight (NLOS) operations. On board processing capability takes in all the sensory information provided by the gyros, accelerometers, altitude meters, wind meter, temperature, etc. to either control the engines directly in conjunction with the control input from the ground station, or relay the information back for analysis to the ground station. Several ISM bands for the necessary wireless links are available at 900 MHz, 2.4 GHz, and 5.2 GHz. For mission-critical tasks, it is best to use the 900-MHz band as the other two bands suffer either from interference or a high path loss. External antenna arrays are necessary to guarantee the link budget in NLOS operations and at large distances.
Phoenix40 Applications
The Phoenix40 can be applied to areas that have been literally out of reach or too dangerous. One application example is scanning and detection of buried UXOs. One obvious advantage is that compared to robots or vehicles moving on the ground, the pressure-sensitive UXO devices will not be triggered by the VTOL platform since it typically hovers over the target area at a distance of about one foot or more, as shown in Figure 2. The optimum way to scan for UXOs is to conduct a systematic Cartesian X-Y grid search in a similar fashion as a geophysicist who uses Ground Penetrating Radars (GPRs) to find manmade geometrical features or foundations under the surface of the Earth. To do this, the Phoenix40 can make use of the Differential Global Positioning System (DGPS) to fly a predetermined X-Y grid to obtain a 2D scan, which can be used for image reconstruction in terms of improved focusing and increased resolution using the Synthetic Aperture Radar (SAR) principle.
Another example is to use the Phoenix40A as a motion detector, as shown in Figure 3. The Phoenix40A can land on a roof, and with the penetration capabilities of the UWB radar, transmit pulses through the roof to detect any moving objects. Note that for motion detection, the radar sensor has to be completely motionless. For larger compounds and buildings with sloped roofs, it may be advantageous to place several motion detectors at different places and at different angles. The Phoenix40A could, for example, unlatch the radar sensor and leave it on the roof for an extended time. The radar sensor can go into a sleep mode where it will only occasionally monitor the floors beneath for detection. If any motion is detected, an alarm is triggered and relayed back to the ground station.
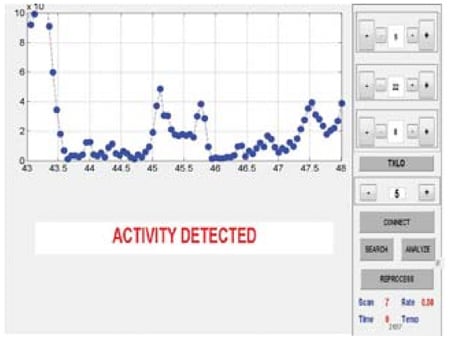
Figure 4 shows a typical GUI readout from the motion sensor. A detection window in terms of down range can be defined, and within this window, a threshold can be set for the optimum detection of motion. For detecting breathing, the detection window can be automatically zoomed in to the range of the person, and the signal can be monitored for a few seconds to determine the breathing rate.
This article was written by Paul Strauch and Mikko Oijala of TiaLinx (Newport Beach, CA). For more information, visit http://info.hotims.com/34457-558.
More From SAE Media Group
Tech Briefs
Test Strategies to Track Hypersonic Threats
Aerospace & Defense Tech Briefs
Stepped-Frequency Distributed Radar for Through-the-Wall Sensing
Automotive Engineering
Homing in on STEM Innovation
Tech Briefs
Quantum Radio Aids Communications and Mapping
Aerospace & Defense Tech Briefs
Digital Radar Warning Receiver
Aerospace & Defense Tech Briefs
Validation of Ubiquitous 2D Radar
Aerospace & Defense Tech Briefs
Detecting Drones with Doppler-Based Radar
Tech Briefs
Microwave Radar Sensor Module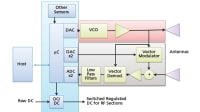
RF & Microwave Technology
Creating a Phased Array Radar for Avalanche Imaging
Aerospace & Defense Tech Briefs
Persistent Systems Auto-Tracking Antenna Adds Aircraft to Network, Enhances Data Sharing
Aerospace & Defense Tech Briefs
Pathfinder Radar ISR and SAR Systems: Tactical Eyes for the Warfighter
Aerospace & Defense Tech Briefs
Developing New Anti-Drone Radar Technology
Aerospace & Defense Tech Briefs
Improving Transmit/Receive Module Test Accuracy and Throughput
Aerospace & Defense Tech Briefs
Development of a 94 GHz Radar System for Dedicated Bird Detection at Airports and Airfields
Aerospace & Defense Tech Briefs
What Today’s Advances in Radar Technology Mean for Testing and Training
Aerospace & Defense Tech Briefs
Australian Air Surveillance Radar Upgrade
Aerospace & Defense Tech Briefs
Everyday Life, Improved by Light: GRYPHON’s Photonic Discoveries
Aerospace & Defense Tech Briefs
Making Fully Digital Beamforming for Radar and Electronic Warfare Applications a Reality
Tech Briefs
Q&A: Radar Imaging at Terahertz Frequencies
Sensor Technology
‘Impossible’ Millimeter Wave Sensor Has Wide Potential
Aerospace & Defense Tech Briefs
How RF-over-Fiber is Providing the Backbone of Next Generation Mil/Aero Networks
Tech Briefs
Radio Signals Image Hidden and Speeding Objects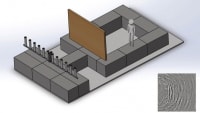
Aerospace & Defense Tech Briefs
An Integrated Framework for Complex Radar System Design
Aerospace & Defense Tech Briefs
Co-Prime Frequency and Aperture Design for HF Surveillance, Wideband Radar Imaging, and Nonstationary Array Processing
RF & Microwave Technology
Radar, Electronic Warfare, and Electronic Intelligence Testing: Identifying Common Test Challenges
Aerospace & Defense Tech Briefs
SIRE: A MIMO Radar for Landmine and IED Detection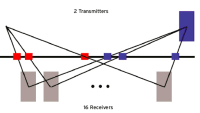
Tech Briefs
Augmented Reality Headset Provides X-Ray Vision
Tech Briefs
New Phase Shifter to Reduce Antenna Signal Loss
Tech Briefs
Autonomous Navigation for Drones
Aerospace & Defense Tech Briefs
Defeating Commercial Drone Threats with Open-Source SDR
Top Stories
NewsSensors/Data Acquisition
![]() Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
INSIDERRF & Microwave Electronics
![]() A Next Generation Helmet System for Navy Pilots
A Next Generation Helmet System for Navy Pilots
INSIDERWeapons Systems
![]() New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
NewsAutomotive
![]() Ford Announces 48-Volt Architecture for Future Electric Truck
Ford Announces 48-Volt Architecture for Future Electric Truck
INSIDERAerospace
![]() Active Strake System Cuts Cruise Drag, Boosts Flight Efficiency
Active Strake System Cuts Cruise Drag, Boosts Flight Efficiency
ArticlesTransportation
Webcasts
Aerospace
![]() Cooling a New Generation of Aerospace and Defense Embedded...
Cooling a New Generation of Aerospace and Defense Embedded...
Energy
![]() Battery Abuse Testing: Pushing to Failure
Battery Abuse Testing: Pushing to Failure
Power
![]() A FREE Two-Day Event Dedicated to Connected Mobility
A FREE Two-Day Event Dedicated to Connected Mobility
Automotive
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Electronics & Computers
![]() Advantages of Smart Power Distribution Unit Design for Automotive &...
Advantages of Smart Power Distribution Unit Design for Automotive &...
Unmanned Systems
![]() Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance
Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance