



Angular Random Walk Estimation of a Time-Domain Switching Micromachined Gyroscope
Achieving near navigation-grade performance without the need to produce resonators with very high quality factors.
The primary metrics that prohibit the use of microelectromechanical systems (MEMS) gyroscopes for navigation-grade inertial navigation units (IMUs) are angle random walk (ARW), bias instability, and scale factor instability. The need for MEMS gyroscopes is due to their decreased cost, size, weight, and power (CSWaP) constraints compared to current navigation-grade solutions. Note that to avoid confusion, while in a statistical context a random walk describes a particular type of random process, ARW is used herein to quantify the effects of white, or Gaussian, noise processes on the rate estimate of a gyroscope.
The accepted theory about how to mitigate effects associated with thermomechanical noise, and thus lower ARW, quality factors on the order of a million are needed. While resonators with quality factors on the order of a million have been demonstrated in laboratory settings, navigation-grade ARW has only been demonstrated in high-vacuum systems (<10 μTorr) that would be challenging to implement in a portable system. Other means of reducing ARW, such as increasing the amplitude of the drive mode, can be problematic. For electrostatically transduced devices, which is one of the more common methods used with MEMS, large oscillations can introduce nonlinear behavior such as electrostatic softening or pull-in.
Relatively recent works have demonstrated that virtual carouseling and closed loop scale factor can be used to significantly reduce bias and scale factor instability, respectively. However, it is important to note that it is unknown if these methods will degrade the performance of a gyroscope with navigation-grade ARW.
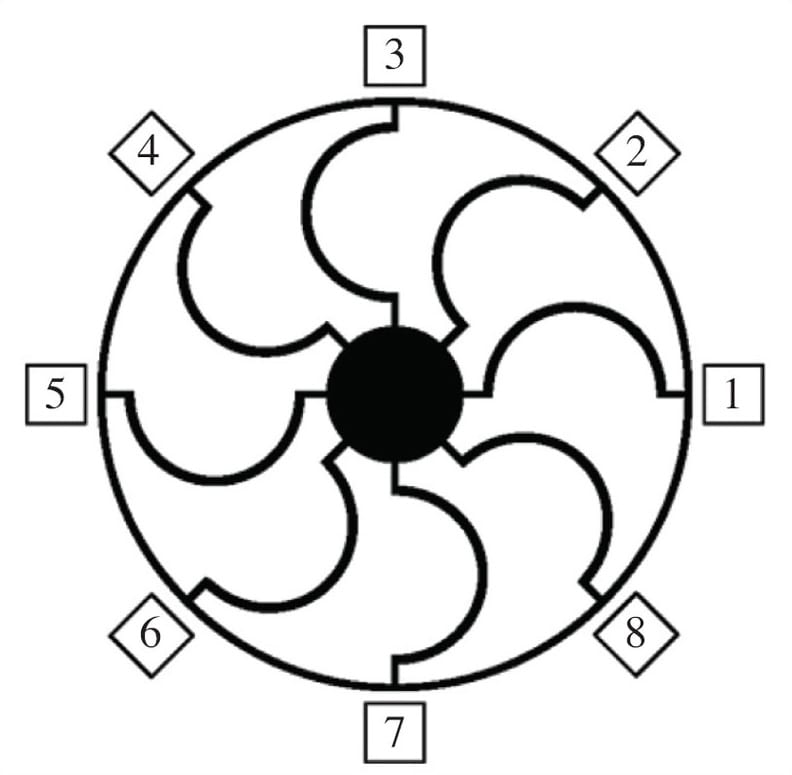
The proposed time-domain switching micromachined gyroscope (TDSMG) seeks to address ARW, bias instability, and scale factor instability by using measurements from discrete trigger events that occur when the proof mass of the gyroscope passes known locations. It builds upon work done with the time-domain switching accelerometer that can estimate acceleration without the need for adjustable parameters. In addition, instead of the sensor's resolution being limited by noise from the amplifiers, it is controlled by the computational precision of the means used to estimate rotation rate and by the precision time is measured. There are no issues associated with noise from feedback electronics as feedback is not needed and noise associated with the readout electronics is minimal as the TDSMG is sensed using digital means. By using highly accurate time interval analyzers and knowledge of the position of the triggers, determining angular rate as well other parameters (i.e., frequency mismatch, time constant mismatch, etc.) can be formulated as a parametric system identification problem.
Unlike classically designed MEMS gyroscopes, timing jitter contributes to the ARW of the TDSMG. Effects due to thermomechanical noise also play a role, but time-domain switching aids in mitigating this effect as large-amplitude oscillations, which would typically introduce nonlinear effects with electrostatically transduced devices, can be used. Thus, with the combination of large-amplitude oscillations, particular conditions for how the signal processing should be implemented, and the low jitter metrics of modern time interval analyzers (<1 ps), navigation-grade performance is capable. Moreover, since the signal processing used to determine angular rate is independent of parameters that are known to be sensitive to temperature or other environmental factors (e.g., variability of the natural frequency of the resonator with respect to temperature), it is expected that the bias and scale factor instability performance will be very good.
The only parameter that is not directly estimated is the angular gain of the gyroscope. This parameter would need to be estimated with an initial calibration. Note that with structurally similar gyroscopes, such as the hemispherical resonator gyroscope, it was found that the angular gain was insensitive to temperature.
This work was done by Andrew B. Sabater and Paul Swanson for the Space and Naval Warfare Systems Center Pacific (SPAWAR). SPAWAR-0006
This Brief includes a Technical Support Package (TSP).

Angular Random Walk Estimation of a Time-Domain Switching Micromachined Gyroscope
(reference SPAWAR-006) is currently available for download from the TSP library.
Don't have an account?
More From SAE Media Group

Automotive Engineering
MEMS Drive Wants to Shake up Automotive Sensor
Aerospace & Defense Tech Briefs
Non-Destructive Damping Measurement for MEMS Acceleration Switches
Aerospace & Defense Tech Briefs
Ka-Band Front-End Monolithic Microwave Integrated Circuits (MMICs) and Transmit/Receive (T/R) Modules Testing

Aerospace & Defense Tech Briefs
Damping Measurement for Wafer-Level Packaged MEMS Acceleration Sensors
Tech Briefs
Laser-Light-Based Accelerometer

Sensor Technology
What’s New in MEMS Sensors for Wearables

Aerospace & Defense Tech Briefs
Drift Improvement with Reinforcement Training of Inertial Sensors
Sensor Technology
All-Silicon MEMS Inertial Sensing at Fiber Optic Gyro Performance Levels
Motion Design
High-Sensitivity, Low-Noise MEMS Accelerometer
Aerospace & Defense Tech Briefs
Stepped-Frequency Distributed Radar for Through-the-Wall Sensing
Aerospace & Defense Tech Briefs
Initial Validation of Ballistic Shock Accelerometers
Aerospace & Defense Tech Briefs
Curled RF MEMS Switches For On-Chip Design
Sensor Technology
New Products
Tech Briefs
Inductive Non-Contact Position Sensor
Aerospace & Defense Tech Briefs
Pulse Analysis Techniques for Radar and Electronic Warfare
Tech Briefs
SiC-Based Microstructures for Sensors
Aerospace & Defense Tech Briefs
Overcoming Performance Limitations of Distributed Brillouin Fiber Laser Sensors
Motion Design
Insect-Inspired Motion Sensing
Tech Briefs
Packaging for SiC Sensors and Electronics

Motion Control Tech Briefs
Circuit Generates Rotation Signal From a Vibratory Gyroscope
Aerospace & Defense Tech Briefs
Fiber Computer Allows Apparel to Run Apps and Understand the Wearer
Tech Briefs
Miniature Lung-Heart Sensor on a Chip
Aerospace & Defense Tech Briefs
Industry Invited to Participate in AeroTech Aerospace and Defense Technical Program
Aerospace & Defense Tech Briefs
A Focal Plane Array and Electronics Model for CMOS and CCD Sensors in the AFIT Sensor and Scene Emulation Tool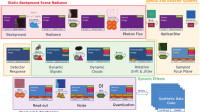
Overview
The document presents a research report on the "Angular Random Walk Estimation of a Time-Domain Switching Micromachined Gyroscope" conducted by the Advanced Concepts and Applied Research Branch and the Advanced Integrated Circuit Technology Branch at the Space and Naval Warfare Systems Center Pacific (SSC Pacific). The project was funded by the Naval Innovative Science and Engineering (NISE) Program.
Micromachined gyroscopes, particularly those based on Micro-Electro-Mechanical Systems (MEMS) technology, are increasingly important for navigation systems due to their compact size and cost-effectiveness. However, they face challenges such as angular random walk and bias instability, which can affect their performance and reliability.
The report focuses on a novel approach to estimating angular random walk in Time-Domain Switching Micromachined Gyroscopes (TDSMG). This method aims to improve the accuracy and stability of gyroscope measurements without the need for high-quality resonators, which are typically expensive and complex to manufacture. By utilizing a new detection technique, the research seeks to enhance the performance of MEMS gyroscopes, making them more viable for various applications, including military and civilian navigation systems.
The document outlines the administrative information, including the authors, performing organizations, and distribution details. It emphasizes that the work is a product of the United States Government and is not copyrighted, allowing for unrestricted dissemination. The report is approved for public release, indicating its relevance and potential impact on the field of inertial navigation.
In summary, this research contributes to the ongoing development of MEMS gyroscopes by addressing key performance issues through innovative estimation techniques. The findings could lead to more reliable and affordable navigation solutions, benefiting both military and civilian sectors. The report serves as a valuable resource for researchers and engineers working in the field of gyroscope technology and inertial navigation systems.
Top Stories
NewsRF & Microwave Electronics
![]() Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
INSIDERAerospace
![]() A Next Generation Helmet System for Navy Pilots
A Next Generation Helmet System for Navy Pilots
INSIDERDesign
![]() New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
INSIDERMaterials
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
NewsPower
![]() Ford Announces 48-Volt Architecture for Future Electric Truck
Ford Announces 48-Volt Architecture for Future Electric Truck
ArticlesAR/AI
Webcasts
Electronics & Computers
![]() Cooling a New Generation of Aerospace and Defense Embedded...
Cooling a New Generation of Aerospace and Defense Embedded...
Automotive
![]() Battery Abuse Testing: Pushing to Failure
Battery Abuse Testing: Pushing to Failure
Power
![]() A FREE Two-Day Event Dedicated to Connected Mobility
A FREE Two-Day Event Dedicated to Connected Mobility
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Automotive
![]() Advantages of Smart Power Distribution Unit Design for Automotive &...
Advantages of Smart Power Distribution Unit Design for Automotive &...
Energy
![]() Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance
Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance