



Non-Destructive Damping Measurement for MEMS Acceleration Switches
Determining damping coefficients is important for categorizing how each sensor or switch operates.
Microelectromechanical systems (MEMS) three-axis acceleration threshold sensors have been developed to measure acceleration threshold levels using voltage switching when the threshold is reached. Switches with different damping coefficients result in different mechanical impedances and response times. Analytical and numerical methods to model damping coefficient values based on empirical data are needed to characterize three-axis acceleration sensors; traditional methods use the displacement of an underdamped system to calculate the damping ratio.
Mechanical switches are single-output devices that distinguish whether closure occurs or not, and lack a transduction mechanism to turn acceleration into a readable displacement signal. A more inventive technique to analyze a closed switch has been devised. A shock table and vibration testing produces a deterministic acceleration input to close an acceleration switch, which has a defined switch gap distance, and mathematical fitting using these deterministic values allows one to determine damping coefficients. By using both an analytical equation fit method and a numerical optimization program, the damping coefficients for MEMS three-axis threshold acceleration sensors were calculated from the results of the tests and design dimensions of the switches.
The two damping measurement techniques presented cover all damping ratio values: underdamped and overdamped systems. Damping characterization will benefit end users by allowing a framework for modeling acceleration switch response in their application, and help them correctly choose a closure-acceleration value for the MEMS switch.
A linear shock table was used to test the sensors, allowing the data acquisition device to plot acceleration and voltage change over time. An open switch indicated little or no voltage drop, but at switch closure, the short circuit caused a change in voltage. The voltage was measured against time, and the change in voltage corresponded to the g-force at the time of switch closure. The acceleration and voltage change was analyzed with the system modeled as a mass with a spring and damper in a second-order differential equation.
Two methods were developed that characterize the damping ratio for packaged MEMS acceleration switches. MEMS acceleration switches only provide a single point of information in an applied acceleration field — when switch closure occurs. The two methods discussed here are ways to measure damping when switch closure is all that is known.
During an impact event, typically all modes are excited resulting in a superposition of modal displacements. During harmonic excitation, a particular mechanical mode can be excited generating a very simple motion. Damping values determined from harmonic excitation will be very specific to the mode, whereas damping values obtained from impact tests will be generalized.
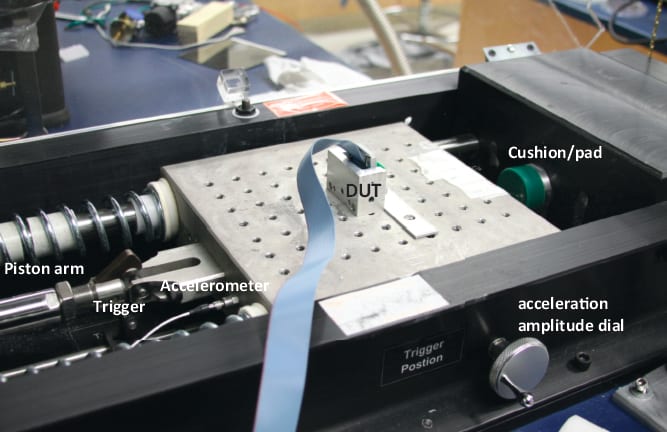
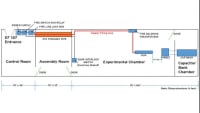
There were many different parts to the experimental system setup used to test the sensors, and two MATLAB programs were written to analyze the data. A linear shock table was used to produce a high-impact shock (see figure). Four channels were used to measure each sensor, one at a time. Six JFTP sensors were attached to the mounting plate and moved at high speeds into a cushion.
The harmonic excitation method used an inductive shaker with accelerometer feedback control to hold a constant acceleration value through the sine sweeps. Data acquisition records the time versus switch voltage data and correlates into frequency versus switch voltage. Switch closure is indicated by a non-zero voltage. MATLAB post-processing programs were developed to sort through each data set and obtain the relevant information needed to solve for damping and natural frequency.
The analytical method for calculating damping was too sensitive to input variations; the acceleration, closure time, and frequency produced impractical damping values when applied to the equation. The numerical method proved to be a better way of determining damping because the analytical method used many assumptions when solving the characteristic equation.
There is a general decreasing acceleration pattern over increasing closure time for both contacts. There are data points that show constant peak acceleration over different closure times. Similar patterns occur with damping as with acceleration.
This work was done by Ryan Knight and Evan Cheng of the Army Research Laboratory. ARL-0181
More From SAE Media Group
Aerospace & Defense Tech Briefs
Damping Measurement for Wafer-Level Packaged MEMS Acceleration Sensors
Aerospace & Defense Tech Briefs
Angular Random Walk Estimation of a Time-Domain Switching Micromachined Gyroscope
Sensor Technology
Machine Condition Monitoring Keeps a Factory Running

Aerospace & Defense Tech Briefs
Curled RF MEMS Switches For On-Chip Design
Aerospace & Defense Tech Briefs
Hybrid Three-Axis Vibration Reducers
Medical Design Briefs
Zero-Power Inertial Switches: Moving Beyond the Limits of Power and Size
Aerospace & Defense Tech Briefs
Hydraulic Cylinder Position Sensor Technology
Tech Briefs
Inductive Non-Contact Position Sensor
Tech Briefs
High-Reliability Radio Frequency MEMS Switch
Aerospace & Defense Tech Briefs
Industry Invited to Participate in AeroTech Aerospace and Defense Technical Program

Tech Briefs
Miniature Lung-Heart Sensor on a Chip
Tech Briefs
New on the Market
Sensor Technology
All-Silicon MEMS Inertial Sensing at Fiber Optic Gyro Performance Levels

Aerospace & Defense Tech Briefs
3D Data Acquisition Platform for Human Activity Understanding
Aerospace & Defense Tech Briefs
Waveform Synthesis for Shock Response Spectrum Replication, Applied to Ground Vehicle Component Testing

Aerospace & Defense Tech Briefs
Inter-Laboratory Combat Helmet Blunt Impact Test Method Comparison
Tech Briefs
Laser-Light-Based Accelerometer

Motion Design
Insect-Inspired Motion Sensing
Motion Design
High-Sensitivity, Low-Noise MEMS Accelerometer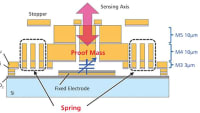
Sensor Technology
MEMS — Smart Sensors for the IoT
Aerospace & Defense Tech Briefs
Content Addressable Memory (CAM) Technologies for Big Data and Intelligent Electronics Enabled By Magneto-Electric Ternary CAM
Sensor Technology
A Better Way to Measure Acceleration

Aerospace & Defense Tech Briefs
New Products
Top Stories
NewsRF & Microwave Electronics
![]() Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
INSIDERAerospace
![]() A Next Generation Helmet System for Navy Pilots
A Next Generation Helmet System for Navy Pilots
INSIDERDesign
![]() New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
INSIDERMaterials
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
NewsPower
![]() Ford Announces 48-Volt Architecture for Future Electric Truck
Ford Announces 48-Volt Architecture for Future Electric Truck
ArticlesAR/AI
Webcasts
Electronics & Computers
![]() Cooling a New Generation of Aerospace and Defense Embedded...
Cooling a New Generation of Aerospace and Defense Embedded...
Automotive
![]() Battery Abuse Testing: Pushing to Failure
Battery Abuse Testing: Pushing to Failure
Power
![]() A FREE Two-Day Event Dedicated to Connected Mobility
A FREE Two-Day Event Dedicated to Connected Mobility
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Automotive
![]() Advantages of Smart Power Distribution Unit Design for Automotive &...
Advantages of Smart Power Distribution Unit Design for Automotive &...
Energy
![]() Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance
Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance