



Two-Dimensional Distributed Velocity Collision Avoidance
Sophisticated algorithms prevent mishaps between autonomous unmanned vehicles.
As the number of autonomous vehicles continues to increase for both commercial and military applications, collision avoidance algorithms are of the utmost importance to successfully execute missions in dynamic environments.
One approach is the two-dimensional (2D) version of the Automated Velocity Obstacle Collision Avoidance (AVOCA) system, a collection of velocity obstacle (VO)-based collision avoidance algorithms. The primary goal of the AVOCA system is to achieve cooperative collision avoidance by dynamic entities in the problem space (agents), performed in a distributed fashion with minimal communication requirements. The algorithms used in AVOCA achieve implicit cooperation through their application and require only basic information (i.e., position and velocity) information on other agents for their calculations.
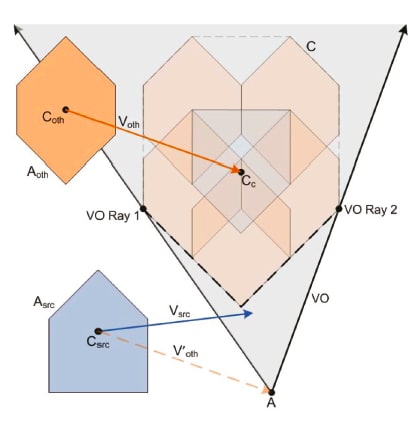
The AVOCA system uses basic VOs, truncated VOs, reciprocal velocity obstacles (RVOs), hybrid reciprocal velocity obstacles (HRVOs), and Clearpath. Generally, a VO is a geometric region (typically an infinite triangle) that is calculated using two agents in the problem space, a source agent (Asrc) (i.e., the agent that is being guided by the algorithm), and another agent (Aoth). The VO region defines the set of all points that, if used for the endpoint for Asrc’s velocity vector, will result in a collision between the two agents at some point in the future.
To perform its avoidance calculations, AVOCA builds basic VOs, RVOs, and HRVOs for all other agents in the problem space. The constructs are built using the velocity and position of each agent, so these data items are required by AVOCA. Basic VOs assume no interagent cooperation. When used unmodified, this means that Asrc assumes full responsibility for performing the collision avoidance between the two agents. The AVOCA system uses bound Euclidean vectors (i.e., vectors in which both the base and end point are used), rather than the more commonly used free vectors (i.e., vectors in which just the magnitude and angle are relevant).
This work was done by Josh L. Wilkerson, Jim Bobinchak, Michael Culp, Josh Clark, Tyler Halpin-Chan, Katia Estabridis, and Gary Hewer of the Naval Air Warfare Center Weapons Division. NAWC-0001
This Brief includes a Technical Support Package (TSP).
Two-Dimensional Distributed Velocity Collision Avoidance
(reference NAWC-0001) is currently available for download from the TSP library.
Don't have an account?
More From SAE Media Group
Aerospace & Defense Tech Briefs
Development of a Vision-Based Situational Awareness Capability for Unmanned Surface Vessels
Aerospace & Defense Tech Briefs
New Cyber Algorithm Shuts Down Malicious Robotic Attacks
Aerospace & Defense Tech Briefs
Industry Invited to Participate in AeroTech Aerospace and Defense Technical Program
Motion Design
Algorithm Helps Swarming Robots Avoid Collisions
Aerospace & Defense Tech Briefs
Effectiveness of Inter-Vehicle Communications and On-Board Processing for Close Unmanned Autonomous Vehicle Flight Formations
Aerospace & Defense Tech Briefs
A Simpler Method for Learning to Control a Robot
Aerospace & Defense Tech Briefs
Simulating Lightweight Vehicles Operating on Discrete Terrain
Aerospace & Defense Tech Briefs
AIA Predicts Flying Air Taxis, Supersonic Air Travel, and Space Industry for 2050
Aerospace & Defense Tech Briefs
Systems Engineering Approach to Develop Guidance, Navigation and Control Algorithms for Unmanned Ground Vehicle
Aerospace & Defense Tech Briefs
DDDAMS-based Urban Surveillance and Crowd Control via UAVs and UGVs
Aerospace & Defense Tech Briefs
Stochastic Surveillance and Distributed Coordination

Tech Briefs
Algorithm Gives Robots a Faster Grasp

Aerospace & Defense Tech Briefs
One Person Can Supervise a Swarm of 100 Unmanned Autonomous Vehicles


Tech Briefs
Machine Vision System
Aerospace & Defense Tech Briefs
Robotic Combat Vehicles: Putting the Brains Behind the Brawn
Aerospace & Defense Tech Briefs
Drone Swarms: A Transformational Technology

Aerospace & Defense Tech Briefs
Soldier-Robot Team Communication: An Investigation of Exogenous Orienting Visual Display Cues and Robot Reporting Preferences
Tech Briefs
Approach Makes Unmanned Agents Self-Sufficient
Aerospace & Defense Tech Briefs
3D Data Acquisition Platform for Human Activity Understanding
Aerospace & Defense Tech Briefs
SAE International Extends Call for Abstracts, Seeks Submissions for AeroTech Conference
Aerospace & Defense Tech Briefs
The CAN Bus: Driving the Future of Autonomous Military Vehicles
Aerospace & Defense Tech Briefs
XPONENTIAL 2019 – An AUVSI Experience
Aerospace & Defense Tech Briefs
Developing Knowledge and Understanding for Autonomous Systems for Analysis and Assessment Events and Campaigns
Aerospace & Defense Tech Briefs
Localization and Mapping of Unknown Locations with Unmanned Ground Vehicles
Tech Briefs
Dynamic Fabric for Motion Generation
Overview
The report titled "Two-Dimensional Distributed Velocity Collision Avoidance" presents a comprehensive study on the Automated Velocity Obstacle Collision Avoidance (AVOCA) system, developed to enhance collision avoidance in multi-agent environments, particularly for autonomous unmanned aerial vehicles (UAVs). Authored by a team from the Naval Air Warfare Center Weapons Division, the report summarizes research conducted in 2013, focusing on the integration of UAVs into naval operations to improve mission efficiency and safety.
AVOCA is designed as a platform-independent, distributed system that requires minimal communication between agents, making it suitable for dynamic environments where multiple UAVs operate simultaneously. The system employs well-established velocity obstacle approaches, which have been further refined for AVOCA's specific needs. A key innovation introduced in this report is the kinematic velocity obstacle (KVO), which accounts for the kinematics of agents in its calculations, thereby enhancing the accuracy and effectiveness of collision avoidance maneuvers.
The report details both simulation results and physical experiments that demonstrate AVOCA's capability to guide agents without collisions in the vast majority of scenarios. The findings indicate that the KVO approach significantly improves the system's performance, allowing for more reliable and efficient navigation in complex environments.
The foreword emphasizes the importance of collision avoidance as a critical capability for cooperative operations involving UAVs, which can reduce the risks associated with personnel in potentially adversarial situations. The integration of UAVs is seen as a means to expand the Navy's operational capacity, particularly for intelligence, surveillance, and reconnaissance (ISR) missions.
The report is unclassified and was released for public distribution, highlighting its relevance to both military and civilian applications in autonomous systems. It includes a thorough review for technical accuracy and is approved for publication by relevant authorities within the Navy.
In summary, this document serves as a significant contribution to the field of autonomous navigation and collision avoidance, showcasing advancements in algorithm development and practical applications for enhancing the safety and effectiveness of UAV operations in multi-agent environments.
Top Stories
INSIDERManufacturing & Prototyping
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
INSIDERManned Systems
![]() FAA to Replace Aging Network of Ground-Based Radars
FAA to Replace Aging Network of Ground-Based Radars
NewsTransportation
![]() CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
NewsSoftware
![]() Accelerating Down the Road to Autonomy
Accelerating Down the Road to Autonomy
EditorialDesign
![]() DarkSky One Wants to Make the World a Darker Place
DarkSky One Wants to Make the World a Darker Place
INSIDERMaterials
![]() Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Webcasts
Defense
![]() How Sift's Unified Observability Platform Accelerates Drone Innovation
How Sift's Unified Observability Platform Accelerates Drone Innovation
Automotive
![]() E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
Power
![]() Hydrogen Engines Are Heating Up for Heavy Duty
Hydrogen Engines Are Heating Up for Heavy Duty
Electronics & Computers
![]() Advantages of Smart Power Distribution Unit Design for Automotive...
Advantages of Smart Power Distribution Unit Design for Automotive...
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design...
Quiet, Please: NVH Improvement Opportunities in the Early Design...