



Pushbroom Stereo for High-Speed UAV Navigation in Cluttered Environments
The high-frame-rate stereo detection system requires no external sensing.
Unmanned aerial vehicles (UAVs) rely on an external motion-capture apparatus that gives the vehicles almost perfect state information at high rates. Major challenges in gathering sensing data necessary for flight are the limited payload, computation, and battery life of the vehicles. Lightweight cameras are a good solution, but require computationally efficient machine vision algorithms that can run within the limits of these vehicles.
A novel method for stereo vision computation was developed that is dramatically faster than the state of the art. The method performs a subset of the processing traditionally required for stereo vision, but is able to recover obstacles in real time at 120 frames per second (fps) on a conventional CPU. The system is lightweight and accurate enough to run in real time on aircraft, allowing for true, self-contained obstacle detection.
A standard block-matching stereo system produces depth estimates by finding pixel-block matches between two images. Given a pixel block in the left image, for example, the system will search through the epipolar line to find the best match. The position of the match relative to its coordinate on the left image, or the disparity, allows the user to compute the 3D position of the object in that pixel block.
One can think of a standard block-matching stereo vision system as a search through depth. As one searches along the epipolar line for a pixel group that matches the candidate block, the space of distance away from the cameras is explored. For example, given a pixel block in a left image, one might start searching through the right image with a large disparity, corresponding to an object close to the cameras. As one decreases disparity, pixel blocks that correspond to objects further and further away are examined until reaching zero disparity, where the stereo base distance is insignificant compared to the distance away and the obtstacle’s location can no longer be determined.

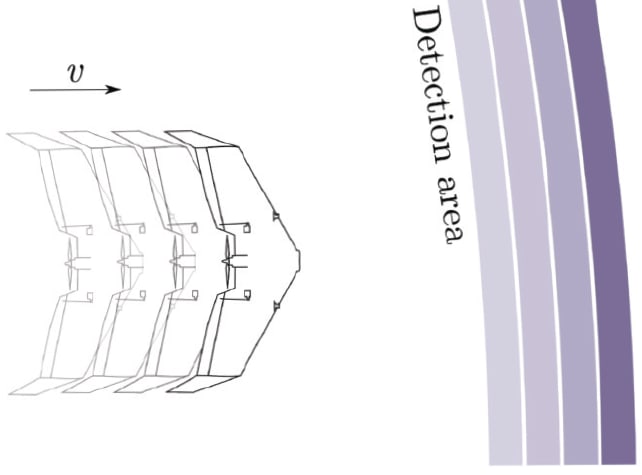
The algorithm is called “pushbroom stereo” because the detection region is pushed forward, sweeping up obstacles like a broom on a floor (and similar to pushbroom LIDAR systems). This is distinct from a “pushbroom camera,” which is a one-dimensional array of pixels arranged perpendicular to the camera’s motion. These cameras are often found on satellites and can be used for stereo vision.
The system requires relatively accurate odometry over short time horizons. This requirement is not particularly onerous because long-term accuracy is not required like many map-making algorithms. In this case, the odometry is only used until the aircraft catches up to its detection horizon, which on many platforms is 5-10 meters away. On aircraft, a wind-corrected airspeed measurement is sufficient.
A design and parameters were chosen to cause sparse detections with few false positives. For obstacle avoidance, not every point on an obstacle needs to be seen, but a false positive might cause the aircraft to take unnecessary risks to avoid a phantom obstacle.
To test the full system with an integrated state-estimator, the platform was flown close to obstacles on three different flights, with control inputs, sensor data, camera images, and onboard stereo processing results recorded. During each flight, points on every obstacle were recorded in real time. The state estimate was robust enough to provide online estimation of how the location of the obstacles evolved relative to the aircraft. While these flights were manually piloted, the system could autonomously avoid the obstacles with these data.
Metrics demonstrate that the pushbroom stereo system sacrificies a limited amount of performance for a substantial reduction in computational cost, and thus a gain in speed. Finally, all data used identical threshold, scoring, and camera calibration parameters.
This work was done by Andrew J. Barry and Russ Tedrake of Massachusetts Institute of Technology. MIT-0004
More From SAE Media Group
Tech Briefs
Keeping Drones Flying When a Motor Fails


Aerospace & Defense Tech Briefs
Geospatial Accuracy of Small Unmanned Airborne System Data in the Coastal Environment
Tech Briefs
Air Traffic Simulation Tool
Aerospace & Defense Tech Briefs
Systems Engineering Approach to Develop Guidance, Navigation and Control Algorithms for Unmanned Ground Vehicle
Aerospace & Defense Tech Briefs
Enhanced SATCOMs for Unmanned Aerial Systems
Automotive Engineering
Q&A: Owl AI Making Better ADAS Systems with Help from Drones
Automotive Engineering
AutoSens: Nodar’s Plan to Make Park Assist Tech Better, Cheaper, Cleaner
Aerospace & Defense Tech Briefs
Adding Context to Full-Motion Video for Improved Surveillance and Situational Awareness
Aerospace & Defense Tech Briefs
Digital Twins: How The Digital Replica Concept Is Used By Robotic Systems
Photonics & Imaging Technology
Helping Autonomous Vehicles See Around Corners
Aerospace & Defense Tech Briefs
5 Startups Developing AI for Defense Application
Aerospace & Defense Tech Briefs
Cyber Risk Assessment and Scoring Model for Small Unmanned Aerial Vehicles

Automotive Engineering
Nodar's GridDetect: Look, Ma, No Lidar!
Motion Design
Navigation Measurement Software

Sensor Technology
New Mathematical Tool Can Select the Best Sensors for The Job
Tech Briefs
Vision-Based Approach and Landing System (VALS)

Tech Briefs
Estimated Spectrum Adaptive Postfilter (ESAP)
Automotive Engineering
Ford Releasing Comprehensive Dataset to Promote Autonomous R&D
Tech Briefs
Drones Use Machine Learning to Detect Landmines
Aerospace & Defense Tech Briefs
Development and Verification of Body Armor Target Geometry Created Using Computed Tomography Scans
Aerospace & Defense Tech Briefs
Eyes In the Sky

Aerospace & Defense Tech Briefs
New Technologies Tackle UAV Challenges

Aerospace & Defense Tech Briefs
Defeating Commercial Drone Threats with Open-Source SDR
Top Stories
NewsRF & Microwave Electronics
![]() Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
INSIDERAerospace
![]() A Next Generation Helmet System for Navy Pilots
A Next Generation Helmet System for Navy Pilots
INSIDERDesign
![]() New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
INSIDERMaterials
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
NewsPower
![]() Ford Announces 48-Volt Architecture for Future Electric Truck
Ford Announces 48-Volt Architecture for Future Electric Truck
ArticlesAR/AI
Webcasts
Electronics & Computers
![]() Cooling a New Generation of Aerospace and Defense Embedded...
Cooling a New Generation of Aerospace and Defense Embedded...
Automotive
![]() Battery Abuse Testing: Pushing to Failure
Battery Abuse Testing: Pushing to Failure
Power
![]() A FREE Two-Day Event Dedicated to Connected Mobility
A FREE Two-Day Event Dedicated to Connected Mobility
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Automotive
![]() Advantages of Smart Power Distribution Unit Design for Automotive &...
Advantages of Smart Power Distribution Unit Design for Automotive &...
Energy
![]() Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance
Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance