



New Approach to Viscosity Enables Complex Motions in Soft Robots
A team of Cornell University researchers has laid the foundation for developing a new class of untethered soft robots that can achieve more complex motions with less reliance on explicit computation. By taking advantage of viscosity — the very thing that previously stymied the movement of soft robots — the new approach offloads control of a soft robot’s cognitive capability from the “brain” onto the body using the robot’s mechanical reflexes and ability to leverage its environment.
A soft robot is made from soft, flexible materials, such as silicone or other elastomers, rather than rigid materials such as metal or plastic used in non-soft robots. Soft robots are designed to mimic the movement and flexibility of biological organisms.
In January, the Cornell team published the paper “Harnessing Non-uniform Pressure Distributions in Soft Robotic Actuators” in Advanced Intelligent Systems. The paper outlines the challenges of achieving complex motion control and activation in soft robots that use traditional fluid-driven actuators. In the traditional setup, the soft robot’s fluid-driven actuator achieves motion when evenly pressurized fluid flows through an elastomer bladder. As the fluid flows through the bladder, an actuator that has been mechanically designed to bend in a pre-determined direction, moves as directed.
Under this classic soft robotic template, if the actuator’s internal flow is viscous or resistant to the flow of the fluid in any way, the actuator’s movement will become sluggish, and the robot’s performance will slow down. Starting with a similar template, instead of trying to completely remove viscosity, the Cornell team took advantage of it. Viscosity is the measure of a fluid’s resistance to flow, or in the case of soft robots, the ease with which the fluid can flow through the elastomer bladder of bellow to drive the movement of an associated actuator.
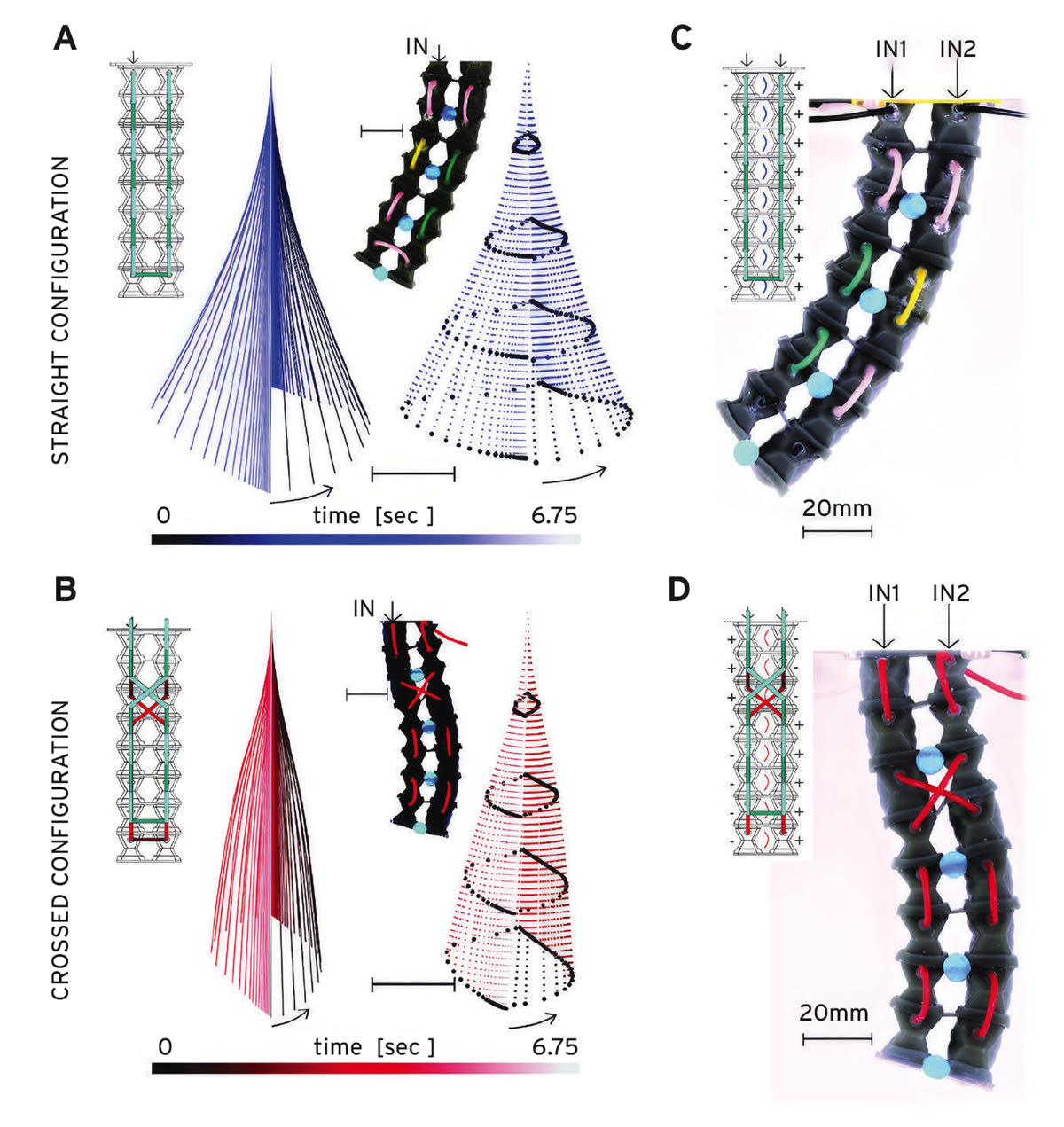
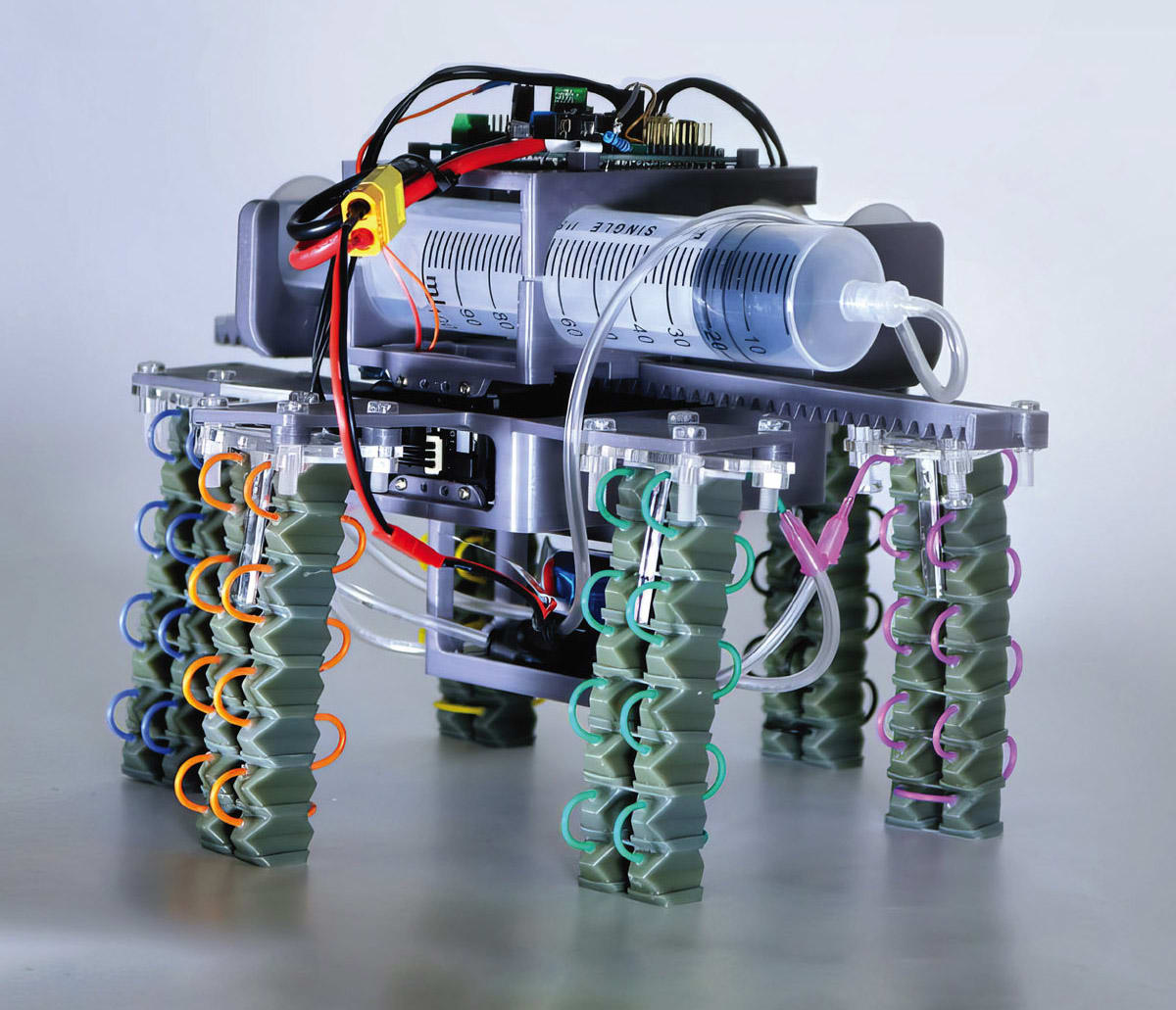
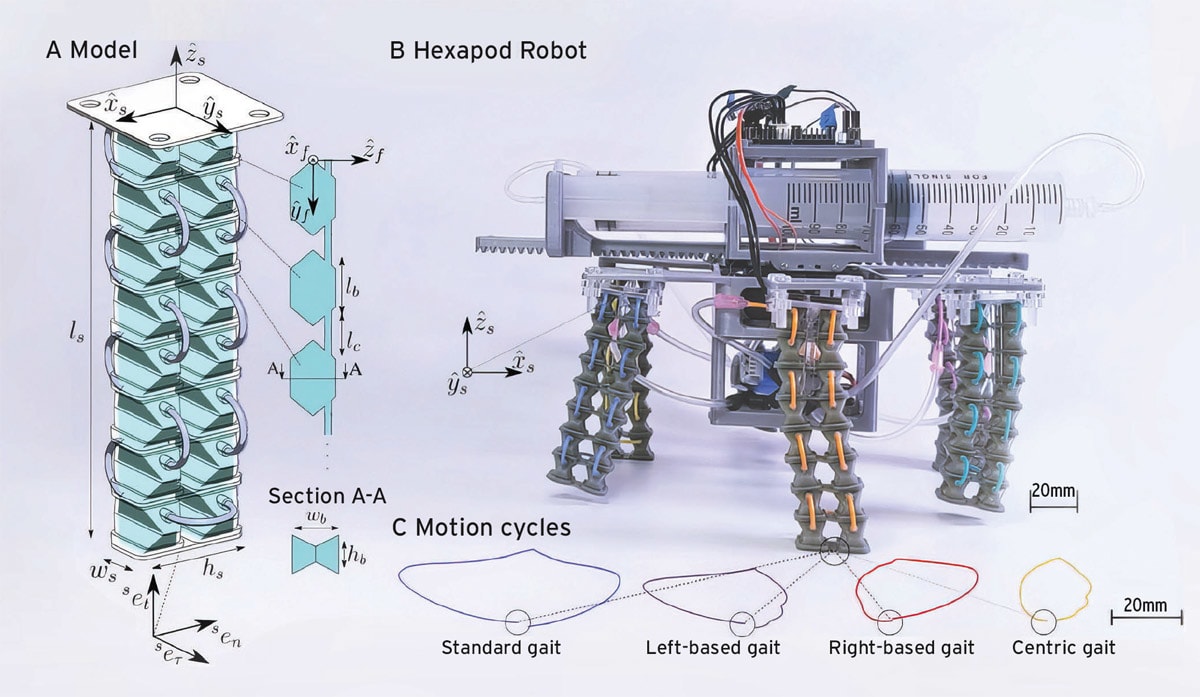
The Cornell team took advantage of the presence of viscosity within untethered soft robots by connecting a series of elastomer bellows with slender tubes, running in a pair of parallel columns, all in a closed system. This configuration allows for antagonistic motions – one that pulls and one that pushes. The tiny tubes induce viscosity, which causes the pressure to be distributed unevenly, bending the actuator into different contortions and motion patterns.
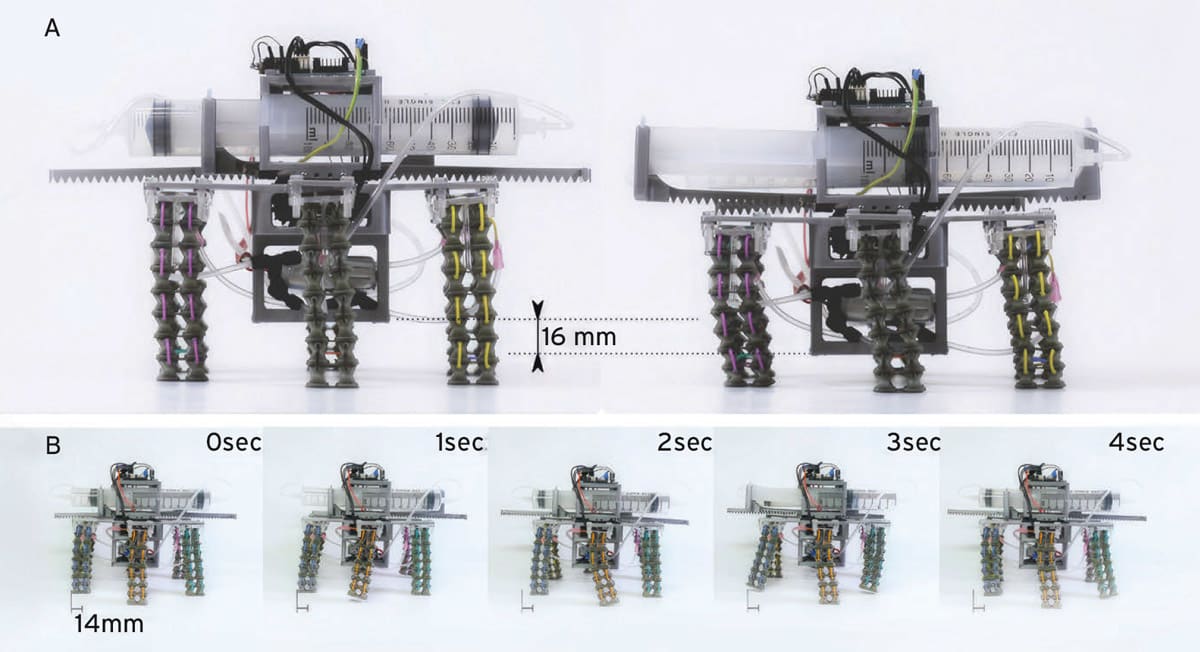
To demonstrate the technology, the team developed a six-legged soft robot driven by two onboard syringe pumps. The two syringes drive the actuation and motion of the legs, which can walk at a speed of 0.05 body lengths per second. It can crouch as well. According to the paper, the demonstrator soft robot is “on the order of the most prominent existing examples of soft, fluid-driven, legged, untethered robots.”
Kirstin Petersen, Assistant Professor of Electrical and Computer Engineering for Cornell’s College of Engineering, says that the simple structure of soft robots “can have much more flexible functionality” than the rigid pre-determined movements of non-soft robots.
“They’re sort of the ultimate embodied intelligent robot,” Petersen said. “Most soft robots these days are fluid-driven. In the past, most people have looked at how we could get extra bang for our bucks by embedding functionality into the robot material, like the elastomer. Instead, we asked ourselves how we could do more with less by utilizing how the fluid interacts with that material.”
The movement of the demonstrator robot is enabled by a set of tools developed by Yoav Maria, a Postdoctoral Researcher for Cornell University and the lead author of the paper. Matia developed a full descriptive model that could predict the actuator’s possible motions and anticipate how different input pressures, geometries, and tube and bellow configurations achieve them – all with a single fluid input. That results in an actuator that can achieve far more complex motions, but without the multiple inputs and complex feedback control previous methods have required.
In the paper, Matia describes the development of the model. “Using an accurate predictive model coupling with a large deformation Cosserat rod model and low-Reynolds-number flow, all dominating dynamic interactions including extension and curvature are captured with two governing equations. Given insights from this model, five design elements are described and demonstrated in practice,” he writes.
Based on the model Matia developed, the research team identified five intuitive mechanisms that could be derived and experimentally demonstrated on their six-legged syringe-driven soft robot. These five mechanisms include the spatial distribution of connected bladders, the viscous-elastic to inertial elastic timescale ratio, the viscous-elastic to input timescale ratio, the mass flux control via viscous resistance, and the cycled baseline pressure.
While the hexapod soft robot demonstrated its ability to use Matia’s model to move at 0.05 body lengths per second, the team believes that is only the beginning of what could be possible using this new approach.
During a brief question and answer session with Aerospace & Defense Technology, Matia further explained what the results of their research could mean for the future of soft robots.
A&DT: How was the team able to reduce the need for the type of explicit computation that soft robots typically rely on?
Matia: A challenge in developing soft robotics is surmising a method for expressing the full complexity of the fluid interaction that happens in these robots. To do that, we focused on two sets of tools, the first being a set of algebraic expressions that allow the engineer to plug their desired mechanical constraints into the system. The second tool, is that I give five rules. These five rules include how to interconnect your bladders, how to address the transients, how frequency affects your movements, how to dial in your formation and how to dial in your initial gauge pressure.
A&DT: How does this differ from the type of computation used in existing soft robotic technology?
Matia: In existing soft robots, traditional computation is used. In traditional computation, for soft robots, like any system, there are central processing units, power sources and sensors and these are assembled into the structure. In our setup, the sensing, the central processing, the power source, all of the computer processing enabling elements are all embedded into the bladders or the body of the soft robot.
A&DT: What did you want to prove in carrying out the experiments with the demonstrator soft robot?
Matia: A primary goal was to demonstrate how to teach a set of bladders a specific behavior. It’s a way of making code into matter. How do we produce a specific behavior without solving complex equations? By using the model and five rules, plug in your mechanical constraints and adjust with the parameters until you produce the desired behavior.
A&DT: What type of computation can occur within the soft robot demonstrator that the team developed?
Matia: The multiple bladders connected with multiple tubings within the demonstrator we developed effectively are a material representation of a neural network. We have these bladders, which function like nodes, and interconnecting tubes that connect weights from one layer to the next. The weights are key to how resistive the flow of the fluid is. Any computation that can be performed with artificial neural networks can also be performed with material-based computation.
A&DT: How do you see this design approach changing the way inert structural materials are used in soft robots, or other machines in the future?
Matia: I really envision a future where the computer processing required to activate a robot or machine is organic to the material that forms the structure of that machine. For example, with an aircraft cockpit. How could the materials go from being inert to in the future communicating and interacting with human pilots in a different way? For now, we’ve really just laid the foundation for what could be possible and what type of complex motions could be achieved.
This article was written by Woodrow Bellamy III, Senior Editor, Aerospace & Defense Technology.
More From SAE Media Group


Motion Design INSIDER
3D-Printed Mini-Actuators Can Move Small Soft Robots, Lock Them Into New Shapes
Motion Design INSIDER
Artificial Muscles Propel a Robotic Leg to Walk and Jump
Tech Briefs
Self-Sensing Electric Artificial Muscles
Tech Briefs
Chemically Driven Wheels “Morph” Into Gears
Tech Briefs
Soft Components for Soft Robotics
Tech Briefs
A Bioinspired Multimaterial Soft Robotic Hand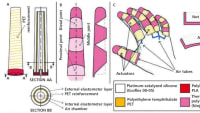
Motion Design
Miniature 3D-Printed Actuators to Control Soft Robots
Tech Briefs
When the Future of Robotics Becomes Pneumatics
Motion Design INSIDER
Tiny Fans on the Feet of Water Bugs Could Lead to Energy Efficient Mini Robots
Motion Design
Flexible Feet Help Robots Walk Faster

Tech Briefs
A Precision Arm for Mini Robots
Tech Briefs
A Leech-Like Robot Climbs Up the Walls
Medical Design Briefs
Medical Design Briefs: 2021 Technology Leaders



Motion Design
Smart Microrobots Adapt to Surroundings
Tech Briefs
Cheetah-Inspired Soft Robots


Motion Design
Robots for Building Resilient Space Habitats

Motion Design INSIDER
Are Shapeshifting “Soft Machines” In Our Future?
Tech Briefs
A Soft Robot that Crawls like a Caterpillar

Top Stories
INSIDERRF & Microwave Electronics
![]() FAA to Replace Aging Network of Ground-Based Radars
FAA to Replace Aging Network of Ground-Based Radars
INSIDERManned Systems
![]() F-22 Pilot Controls Drone With Tablet
F-22 Pilot Controls Drone With Tablet
Road ReadyTransportation
![]() 2026 Toyota RAV4 Review: All Hybrid, All the Time
2026 Toyota RAV4 Review: All Hybrid, All the Time
INSIDERSoftware
![]() Algorithms for Autonomous Marine Vehicles
Algorithms for Autonomous Marine Vehicles
INSIDERDefense
![]() L3Harris Starts Low Rate Production Of New F-16 Viper Shield
L3Harris Starts Low Rate Production Of New F-16 Viper Shield
INSIDERMaterials
![]() New 3D-Printable Nanocomposite Prevents Overheating in Military Electronics
New 3D-Printable Nanocomposite Prevents Overheating in Military Electronics
Webcasts
Automotive
![]() Hydrogen Engines Are Heating Up for Heavy Duty
Hydrogen Engines Are Heating Up for Heavy Duty
Power
![]() SAE Automotive Podcast: Solid-State Batteries
SAE Automotive Podcast: Solid-State Batteries
Test & Measurement
![]() SAE Automotive Engineering Podcast: Additive Manufacturing
SAE Automotive Engineering Podcast: Additive Manufacturing
Information Technology
![]() A New Approach to Manufacturing Machine Connectivity for the Air Force
A New Approach to Manufacturing Machine Connectivity for the Air Force
Automotive
![]() Optimizing Production Processes with the Virtual Twin
Optimizing Production Processes with the Virtual Twin