



Developing Fleets of Autonomous Underwater Vehicles
Fleets of AUVs can have a significant impact on the ability to search for mines in very shallow water, surf zone, and beach regions.
Autonomous underwater vehicles (AUVs) have a demonstrated capability to collect valuable data for scientific and military purposes. Historically, individual vehicles have been used. To reduce the overall time and cost of acquiring data over large areas, multiple vehicles must be used. A fleet of five AUVs, capable of underwater commendation, was fabricated. These AUVs include small submarines, referred to as “swimmers,” and small, two-tracked vehicles, referred to as “crawlers.” The control and communication algorithms developed in this work will enable AUVs to use formations to search for mines and to communicate with each other in order to implement cooperative behavior. Languages and logics were developed to enable collaborative operations among the vehicles.
The AUVs operated autonomously, in that they enabled their operations on their own, initiated and constrained by underwater acoustic communication and navigation against a general behavioral background provided by programmed logics. The operations were not choreographed in advance and programmed into the machines, nor were they the result of intervention by an operator on the surface. The vehicles performed deployment, formation-flying, vehicle replacement, divert-to-point of interest, and leader replacement behaviors.
The submarines were used to test the cooperative control algorithms and navigation procedures. Each vehicle was 1 meter long and 10 cm in diameter, and was equipped with a Woods Hole Acoustic micro-modem for communication and navigation. A distributed approach for control on each vehicle was used. The five functional units communicated using an Ethernet hub. The instrumentation unit collected and configured information from all of the sensors on the AUV except those requiring underwater communications.
The internal sensors included a battery monitor, a water detector, and a thermometer to monitor the internal temperature of the AUV. The external sensors consisted of a GPS unit, an electronic compass, a pressure sensor to determine the depth, and an accelerometer to determine pitch and roll. All sensors except the GPS were polled every 0.25 seconds. The mission control unit performed all of the control calculations necessary for navigation of the AUV and recorded all incoming and outgoing Ethernet packets to a 128-Mb XDRAM card. The 128-Mb data capacity of the log provided for approximately 30 hours of data storage. The locomotion unit controlled the speed of the propulsion motor and set the position of the control surfaces.
A Woods Hole Modem was used for underwater acoustic communication and navigation. When on the surface, wireless communications were accomplished with a 900-MHz MaxStream 9Xstream radio modem. A Linksys model WCF12 wireless CompactFlash 802.1 lb Ethernet card was used to allow configuration of the AUV from the base station.
Languages, logics, and algorithms were developed to enable collaborative operations among AUVs. Automatic formation control algorithms enable multiple AUVs to search cooperatively for mines in close formation. Organized in a swimmer-trailer formation, with one swimmer designated the leader, and programmed to conduct coordinated searches in a lawnmower pattern, various autonomous behaviors associated with large-area MCM have been modeled and simulated. These behaviors include deployment, vehicle replacement, leader replacement, divert to point of interest, and map building. The behaviors are supported by a version of AUVish, an agent communication language designed for the vehicles. Vehicle replacement is controlled by the leader with a 32-byte message broadcast.
The integrated platoon of swimmers and crawlers envisioned in this project should have a significant impact on the ability of the Navy to search for mines in very shallow water, surf zone, and beach regions. Full or even partial autonomy will produce a significant force multiplication effect on naval operations related to mines countermeasures.
This work was done by Dean B. Edwards of the University of Idaho for the Office of Naval Research. For more information, download the Technical Support Package (free white paper) at www.defensetechbriefs.com/tsp under the Mechanics/Machinery category. ONR-0010
This Brief includes a Technical Support Package (TSP).

Developing Fleets of Autonomous Underwater Vehicles
(reference ONR-0010) is currently available for download from the TSP library.
Don't have an account?
More From SAE Media Group
Sensor Technology
For Power-Efficient Wireless Sensing, Start with Analog Processing

Aerospace & Defense Tech Briefs
SAE International Extends Call for Abstracts, Seeks Submissions for AeroTech Conference
Aerospace & Defense Tech Briefs
Tethered, Remotely Operated Miniature Submarine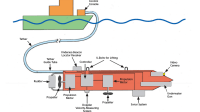
Aerospace & Defense Tech Briefs
Industry Invited to Participate in AeroTech Aerospace and Defense Technical Program

Sensor Technology
The Expanding Role of Sensors in the IoT/IIoT

Sensor Technology
The Many Benefits of Smart IIoT Connected Factories

Aerospace & Defense Tech Briefs
3D Data Acquisition Platform for Human Activity Understanding
Aerospace & Defense Tech Briefs
Thrust in Space - The Nuances of Thruster Valve Design
Tech Briefs
New on the Market: September 2021
Motion Design
Sensing the Future of Pneumatics
Sensor Technology
Self-Powered Wireless Sensors in the Industrial Internet of Things
Tech Briefs
New on the Market: April 2022
Tech Briefs
New on the Market: January 2022
Tech Briefs
New on the Market
Tech Briefs
Soft Robotic Gripper Based on Twining Plants



Sensor Technology
New Products



Motion Design
Encoder Selection: Finding the Right Fit
Tech Briefs
New on the Market: June 2019

Overview
The document outlines a research project focused on the development and operation of fleets of Autonomous Underwater Vehicles (AUVs) aimed at enhancing data collection for scientific and military purposes. Traditionally, AUVs operated individually, which limited efficiency in covering large areas. This project addresses that limitation by fabricating a fleet of five AUVs capable of collaborative operations, thereby reducing the time and cost associated with data acquisition.
The research is a continuation of previous projects on decentralized control of multiple autonomous vehicles, emphasizing a system-theoretic approach to distributed control problems. The project explores four main areas:
-
Actuator Constrained Distributed Control: Fundamental research is conducted to address the challenges of controlling multiple AUVs with limited actuator capabilities.
-
Fuzzy-Logic Control: A fuzzy-logic approach to hierarchical platoon-level control is investigated, building on prior research at the University of Idaho and Washington State University. This method aims to enhance the cooperative search processes for tasks such as mine detection.
-
Open Architecture Control System: The development of a scalable and robust control and communication system is a key focus. This includes a "plug-and-play" communication network that allows for flexible integration of various components.
-
In-Water Testing: Testing is conducted at Lake Pend Oreille, Idaho, to evaluate underwater communication and control among multiple AUVs and tethered crawlers. The AUVs, each measuring 1 meter in length and 10 cm in diameter, are equipped with Woods Hole Acoustic micro-modems for navigation and communication.
The document also details the successful operation of the five AUVs, which were able to communicate and coordinate their actions autonomously without pre-programmed instructions or surface operator intervention. This capability is crucial for conducting complex underwater missions effectively.
Overall, the project demonstrates significant advancements in the field of autonomous underwater vehicles, showcasing the potential for collaborative operations to improve efficiency in underwater data collection. The findings contribute to the ongoing development of autonomous systems that can operate in challenging environments, paving the way for future innovations in marine exploration and research.
Top Stories
NewsRF & Microwave Electronics
![]() Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
INSIDERAerospace
![]() A Next Generation Helmet System for Navy Pilots
A Next Generation Helmet System for Navy Pilots
INSIDERDesign
![]() New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
INSIDERMaterials
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
NewsPower
![]() Ford Announces 48-Volt Architecture for Future Electric Truck
Ford Announces 48-Volt Architecture for Future Electric Truck
ArticlesAR/AI
Webcasts
Electronics & Computers
![]() Cooling a New Generation of Aerospace and Defense Embedded...
Cooling a New Generation of Aerospace and Defense Embedded...
Automotive
![]() Battery Abuse Testing: Pushing to Failure
Battery Abuse Testing: Pushing to Failure
Power
![]() A FREE Two-Day Event Dedicated to Connected Mobility
A FREE Two-Day Event Dedicated to Connected Mobility
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Automotive
![]() Advantages of Smart Power Distribution Unit Design for Automotive &...
Advantages of Smart Power Distribution Unit Design for Automotive &...
Energy
![]() Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance
Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance