



AutoSens: RFpro Reveals ‘Massive, Complicated’ LA Model
You can now drive a 36-km (22-mile) loop through various neighborhoods of Los Angeles from anywhere.

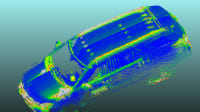
Simulation company rFpro has already mapped over 180 digital locations around the world, including public roads, proving grounds and race circuits. But the company’s latest is by far its biggest and most complicated. Matt Daley, technical director at rFpro, announced at AutoSens USA 2024 that its new Los Angeles route is an “absolutely massive, complicated model” of a 36-km (22-mile) loop that can be virtually driven in both directions. Along these digital roads – which were built off survey-grade LIDAR data with a 1 cm by 1 cm (1.1-in by 1.1 in ) X-Y grid – rFpro has added over 12,000 buildings, 13,000 pieces of street infrastructure (like signs and lamps), and 40,000 pieces of vegetation.

“It’s a fantastic location,” Daley said. “It’s a huge array of different types of challenging infrastructure for AVs. You can drive this loop with full vehicle dynamic inputs, ready to excite the suspension and, especially with AVs, shake the sensors in the correct way as you would be getting if you were driving those real roads.”
The new digital map covers an area in southwest LA that includes Highway 110 from the harbor up to Carson, going through industrial areas, dense residential areas in Torrance, and suburban Rolling Hills. The variety is what makes this new model so valuable to companies that want to simulate various tests, especially for new automated driving systems.
“We are now able to give autonomous vehicles the ability to test in all of these different types of environments, junctions, and road types that they’re going to experience in day-to-day life,” Daley said, adding that there are railroad crossings, gas stations, intersections, and highway on- and off-ramps in the data set.
“The grand challenge of autonomous development is that you need so much diversity available to you,” Daley told SAE Media. “It’s extremely difficult to get in the real world, because you have to go so many different miles, so many places, and really drive so much volume in order to create it. It’s a slightly different challenge in simulation, because we can create diversity and let people create second levels of diversity inside existing maps.”
Not just for human drivers

RFpro started in 2007 in the driver-in-the-loop market. In 2015, the company started to think about how to integrate ADAS testing.
“We realized that the amount of investment that we got in providing a solid simulation platform and infrastructure, as well as our technologies and abilities to build 3D models, we could add additional layers,” Daley said. “We knew it wouldn’t be the same product, we had to keep adding additional functionality because it was no longer just humans that were looking into this. We had to add digital eyes, and cameras are not human eyes. They are different in the way that they sample the world over different time periods. And then [we needed] lidar and radar models as well, so we created the sensor API system to allow plugins to be modeled, and to come and sit in as additional channels in the simulation.”
No matter if a human or a digital driver is viewing the scene in an rFpro map, it uses the same geometric world, Daley said, including what all the materials are made of. Humans will see the virtual world displayed with an eight-bit RGB color per pixel, but a simulated camera might process a “higher-bit image that gets passed on through a perception system down the chain,” Daley said. “The fundamentals of the world and how you calculate the physics in the world are still the same. It all comes down to how do you present that onwards in the correct format for how the sensor needs to see.”

RFpro acquired Ansible Motion in 2022, which provides 3D full-motion platform hardware and can do full integrated solutions, Daley said. “We have other partners and other resellers that integrate [our maps] onto their own hardware,” he said. “A lot of our customers do it themselves as well. I was a customer at Ferrari back in 2014, when we converted an in-house simulator they had and brought rfPro onboard and upgraded an existing system with a higher fidelity world. And why does this matter? Well, it’s the virtual playground that allows our customers to create hundreds of 1,000s of different tests of different edge cases and to recreate some of the known hazardous events that can happen in the real world in a highly accurate model of a real-world location, with the real world complexities that are there.”
Daley said rFpro’s system also allows customers to “generate things that didn’t happen, that you couldn’t find by doing real-world drives, because you simply do not have enough time, money, resources, vehicles, or the pure luck of finding the combination of weather and vehicles and pedestrians all doing the edge case scenarios that you need. Because [the LA map is] a real-world location, you can also correlate, you can do matching tests in your simulation and your real-world location to build your level of confidence in the simulation that really helps you to exploit the power of using synthetic training data.”
Rfpro’s new LA route can be driven in real-time with a human-in-the-loop driver or used in a simulator with full-fidelity ray tracing to generate complicated high-fidelity sensables, providing tens of thousands of tests in a short time. Digital cameras can also simulate edge cases, with nuances that come from having motion blur in an image or with full rolling-shutter effects that each OEM can define for each of their sensors. “It produces the highest fidelity training data to go into autonomous systems, and it’s built on top of and alongside industry led sensable integrations,” Daley said.
Overall, the LA map is rFpro’s best example of a map based on the real world that can provide automated driving tech companies with confidence that what they find in the simulator will match what might happen in the real world.
“You can only get to that position if you have confidence in your simulation,” Daley said. “It's pretty impossible to correlate your simulation if that thing is not a real location, if you're just making up a location. Having real world locations is hugely valuable to actually give you that confidence to scale.”
More From SAE Media Group
Automotive Engineering
Volvo EX90 Uses AI, NVIDIA SoC to Make Automated Driving Safer
ADAS & Autonomous Vehicle Engineering
AV Simulation Testing Faces a Long and Winding Road
Autonomous Vehicle Engineering
Data Drives Driverless Truck Launch
Autonomous Vehicle Engineering
GM Announces Door-To-Door Ultra Cruise ADAS
Autonomous Vehicle Engineering
Vehicle Sensors Go Longer Range
Autonomous Vehicle Engineering
Aptiv Centralizing Computing Power to Speed Autonomous Vehicle Development
Automotive Engineering
Provizio Eyes Safety with Radar, Not LiDAR
Autonomous Vehicle Engineering
Making the Strategic Move into AV Testing
Autonomous Vehicle Engineering
The ‘Buzz’ in Driverless Shuttling
Automotive Engineering
Single-chip digital imaging radar heads for 2022 production
Autonomous Vehicle Engineering
New Roles for Lidar in Autonomy’s Lower Levels
Automotive Engineering
Taking ‘Eyes-Off’ the ADAS Future
ADAS & Autonomous Vehicle Engineering
AV Life After Argo AI
Automotive Engineering
ZF Hikes Performance of ProAI Supercompute Platform
Autonomous Vehicle Engineering
Hopeful but Closer Scrutiny for SAE Level 4 Automation
Automotive Engineering
New Proving-Ground Tools Needed to Manage AV Testing
Autonomous Vehicle Engineering
Toposens 3D Sonar Seeks Objects Overlooked by Lidar
Autonomous Vehicle Engineering
Continental's Lidar in a Flash
Autonomous Vehicle Engineering
Horiba MIRA’s Vision for World-Class AV Testing
Autonomous Vehicle Engineering
'Level 2+': Making Automated Driving Profitable, Mainstream
Automotive Engineering
Are Today’s Sensors Ready for Next-Level Automated Driving?
Off-Highway Engineering
Commercial Vehicle ADAS: Testing, Testing and More Testing
Autonomous Vehicle Engineering
BMW 7-Series Drives Itself Through Own Assembly
Autonomous Vehicle Engineering
New SMARTCenter Opens as North America’s Largest AV Test Facility
Autonomous Vehicle Engineering
Steering Toward Full Vehicle Autonomy
Autonomous Vehicle Engineering
10 Best Practices for ADAS and AV Testing
Autonomous Vehicle Engineering
Sony Jumps into AV Sensors, Software
Autonomous Vehicle Engineering
Aptiv’s Satellite Route to ‘Democratizing’ Autonomous Tech
Automotive Engineering
Nvidia’s New Level 2+ Autonomy Platform Is Making Cars Safer Today
Top Stories
INSIDERManned Systems
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
INSIDERAerospace
![]() FAA to Replace Aging Network of Ground-Based Radars
FAA to Replace Aging Network of Ground-Based Radars
NewsUnmanned Systems
![]() Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
NewsDesign
![]() CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
NewsSoftware
![]() Accelerating Down the Road to Autonomy
Accelerating Down the Road to Autonomy
INSIDERManned Systems
![]() Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Webcasts
Power
![]() Hydrogen Engines Are Heating Up for Heavy Duty
Hydrogen Engines Are Heating Up for Heavy Duty
Transportation
![]() Advantages of Smart Power Distribution Unit Design for Automotive...
Advantages of Smart Power Distribution Unit Design for Automotive...
Automotive
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design...
Quiet, Please: NVH Improvement Opportunities in the Early Design...
Power
![]() A FREE Two-Day Event Dedicated to Connected Mobility
A FREE Two-Day Event Dedicated to Connected Mobility
Connectivity
![]() E/E Architecture Redefined: Building Smarter, Safer, and Scalable Vehicles
E/E Architecture Redefined: Building Smarter, Safer, and Scalable Vehicles
Manufacturing & Prototyping
![]() How Sift's Unified Observability Platform Accelerates Drone Innovation
How Sift's Unified Observability Platform Accelerates Drone Innovation