



Miniature Wheel-Leg Mobile Robots
These robots can run and can climb obstacles with cockroach-like motions.
Mini-Whegs™ are small mobile robots, designed according to abstracted cockroach locomotion principles, that can run and can climb obstacles taller than themselves. Mini-Whegs are derived from larger mobile robots denoted Whegs™, with modifications to reduce size, reduce the number of mechanisms, and increase relative mobility. The name "Whegs" originated as a contraction of "wheel-legs," referring to three-spoke appendages by means of which these robots move, as described below.

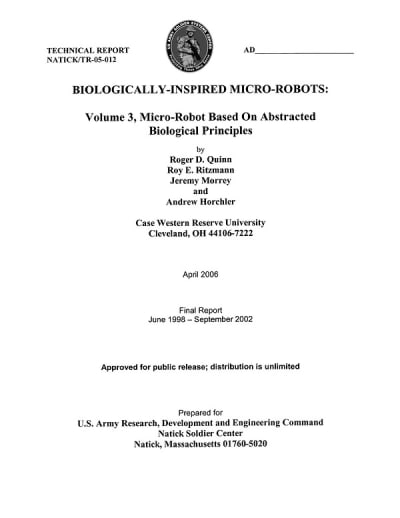
Whegs combine the speed and simplicity of wheels with the climbing mobility of legs, and offer a compromise between climbing ability and smooth motion. Figure 1 depicts several aspects of the Whegs concept. The spokes of each wheel are spaced apart at 120° angular intervals. Two wheel-legs are mounted on each axle on opposite sides of the robot. The two wheel-legs on each axle are nominally oriented at 60° out of phase with each other.
Each axle contains a passive, compliant mechanism that enables the two attached wheel-legs to rotate by as much as 60° from their nominal phase difference of 60°. This feature is a key element of both mobility and relative simplicity of design in that it enables a robot to adapt its motion to changing terrain in a manner similar to that of a cockroach, without need for an active adaptation control subsystem. In particular, as illustrated by the example of Figure 1, this feature can cause the wheel-legs in each pair to become aligned as needed for climbing an obstacle and then spring back to the normal 60° phase difference once the obstacle has been surmounted.
A Whegs has six wheel-legs and, hence, contains three axles: one for each pair of wheel-legs. A Mini-Whegs contains four wheel-legs and, hence, contains two axles: one for the front pair of wheel-legs and one for the rear pair of wheel-legs. One motor drives all three axles in a Whegs or both axles in a Mini-Whegs via chains and sprockets, causing the robot to nominally walk in a cockroach-like alternating tripod gait. Steering is accomplished by means of an electrically actuated servomechanism connected to a front-wheel steering linkage similar to that of an automobile.

To date, five Mini-Whegs have been built, each incorporating a different advancement. All are battery powered and most are operated by remote (radio) control. The first one, shown in Figure 2, has a body about 3.25" ~(8.3 cm) long, 2.5" ~(6.4 cm) wide and 0.8" ~(2.0 cm) high; wheel-legs having a radius of 1.3" ~(3.3 cm); and a total mass of 125 g. Most of the Mini-Whegs can move at a sustained speed of more than 10 body lengths per second and can run over obstacles taller than their body lengths. They can run forward and backward and on either side. They are sufficiently robust that they can fall down stairs without sustaining noticeable damage. Each can carry a payload equal to twice its weight. One of the Mini-Whegs contains a jumping mechanism that enables it to surmount an obstacle is high as 9" ~(23 cm) — more than the height of a standard stair step.
This work was done by Roger D. Quinn, Roy E. Ritzmann, Jeremy Morrey, and Andrew Horchler of Case Western Reserve University for the Defense Advanced Research Projects Agency.
This Brief includes a Technical Support Package (TSP).
Miniature Wheel-Leg Mobile Robots
(reference DARPA-0004) is currently available for download from the TSP library.
Don't have an account?
More From SAE Media Group
Tech Briefs
Minimally Actuated Hopping Robot

Motion Design
Flexible Feet Help Robots Walk Faster
Motion Design
Dynamic Gripper Mimics Adjustable Grip of the Human Hand



Tech Briefs
Soft Components for Soft Robotics

Tech Briefs
Rotary Microspine Technology
Tech Briefs
Self-Learning Robot Hands Adapt to Grasp Objects

Tech Briefs
Cheetah-Inspired Soft Robots



Tech Briefs
Chemically Driven Wheels “Morph” Into Gears
Aerospace & Defense Tech Briefs
SAE International Extends Call for Abstracts, Seeks Submissions for AeroTech Conference

Motion Design
Hand Guiding Robots
Tech Briefs
Soft Robotic Gripper Based on Twining Plants
Medical Design Briefs
Quiet Gears Improve Patient Comfort and Imaging Quality in Medical Equipment


Tech Briefs
Steerable Hopping Six-Legged Robot
Aerospace & Defense Tech Briefs
Industry Invited to Participate in AeroTech Aerospace and Defense Technical Program


Motion Design
Get a Handle on Grippers
Overview
The document titled "Biologically-Inspired Micro-Robots: Volume 3, Micro-Robot Based On Abstracted Biological Principles" is a final report authored by Roger D. Quinn, Roy E. Ritzmann, Jeremy Morrey, and Andrew Horchler from Case Western Reserve University. It was produced under a contract with the Defense Advanced Research Projects Agency (DARPA) and covers research conducted from June 1998 to September 2002.
The report focuses on the development of micro-robots that are inspired by biological systems, aiming to leverage principles observed in nature to enhance robotic design and functionality. The primary objective is to create micro-robots that can perform tasks in environments that are challenging for traditional robots, particularly in military applications.
Key aspects of the research include the design and implementation of a "Flying Four-Bar" jumping mechanism, which was selected for its potential to provide effective locomotion. The report emphasizes the need for an automatic and repeatable energy storage method to facilitate the operation of this mechanism. The design process was guided by considerations of simplicity and expected performance, ensuring that the micro-robots would be efficient and reliable.
The findings of the report are not to be construed as an official position of the Department of the Army unless specified by authorized documents. The report also includes disclaimers regarding the citation of trade names and the destruction of classified documents, ensuring compliance with security protocols.
Overall, the document presents a comprehensive overview of the research and development efforts in biologically-inspired micro-robotics, highlighting the innovative approaches taken to mimic biological functions and improve robotic capabilities. The work aims to contribute to advancements in micro-robot technology, with potential applications in various fields, particularly in enhancing soldier systems and operational effectiveness in complex environments.
The report is approved for public release, allowing for broader dissemination of its findings and insights, which could benefit researchers, engineers, and military personnel interested in the intersection of biology and robotics.
Top Stories
INSIDERDefense
![]() New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
NewsAutomotive
![]() Ford Announces 48-Volt Architecture for Future Electric Truck
Ford Announces 48-Volt Architecture for Future Electric Truck
INSIDERManufacturing & Prototyping
![]() Active Strake System Cuts Cruise Drag, Boosts Flight Efficiency
Active Strake System Cuts Cruise Drag, Boosts Flight Efficiency
ArticlesTransportation
![]() Accelerating Down the Road to Autonomy
Accelerating Down the Road to Autonomy
INSIDERMaterials
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
Road ReadyTransportation
Webcasts
Electronics & Computers
![]() Cooling a New Generation of Aerospace and Defense Embedded...
Cooling a New Generation of Aerospace and Defense Embedded...
Power
![]() Battery Abuse Testing: Pushing to Failure
Battery Abuse Testing: Pushing to Failure
Connectivity
![]() A FREE Two-Day Event Dedicated to Connected Mobility
A FREE Two-Day Event Dedicated to Connected Mobility
Automotive
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Transportation
![]() Advantages of Smart Power Distribution Unit Design for Automotive &...
Advantages of Smart Power Distribution Unit Design for Automotive &...
Aerospace
![]() Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance
Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance