



Autonomous and Resilient Management of All-Source Sensors for Navigation Assurance
As the number and type of sensors informing a system increases, so does the probability of corrupting the system with sensor modeling errors, signal interference, and undetected faults.
Over the past two decades, the United States Air Force has focused on complementing its reliance on the Global Positioning System (GPS) for navigation and timing solutions through the use of alternative navigation sources and sensors. Additionally, senior leaders within the Air Force have recently stated that one of the top priorities for the service is “to cost- effectively modernize to increase the lethality of the force and drive innovation to secure our future.” With this in mind, the Air Force Institute of Technology’s Autonomy and Navigation Technology (ANT) Center has made its vision to provide “defense-focused autonomy and navigation, anywhere, anytime, using anything.”
All-source navigation has become increasingly relevant over the past decade with the development of viable alternative sensor technologies. However, as the number and type of sensors informing a system increases, so does the probability of corrupting the system with sensor modeling errors, signal interference, and undetected faults. Though the latter of these has been extensively researched, the majority of existing approaches have constrained faults to biases, and designed algorithms centered around the assumption of simultaneously redundant, synchronous sensors with valid measurement models, none of which are guaranteed for all-source systems.
Unlike the well-understood, synchronous, and redundant nature of the GPS multi-sensor constellation, all-source navigation systems tend to be heterogeneous in composition, with each sensor proven only within a well-controlled environment, and not guaranteed to be synchronous or redundant. Additionally, as the number of sensors and measurement domains that are exploited for navigation purposes increases, so does the probability of corrupting the navigation solution with errors in sensor modeling, unexpected signal interference, and or undetected faults. Therefore, in order to fulfill this vision, alternative (non-GPS) all-source navigation technology must be brought up to a level of operational readiness that allows its use in a manner that is resilient, and thus capable of not only detecting when any of the above failure modes are present, but also of assuring navigation integrity in their presence, and self-correcting and recovering from such failures, all in an autonomous, realtime, plug-and-play architecture.
This research aims to provide all-source multi-sensor resiliency, assurance, and integrity through an autonomous sensor management framework. The proposed framework dynamically places each sensor in an all-source system into one of four modes: monitoring, validation, calibration, and remodeling. Each mode contains specific and novel real-time processes that affect how a navigation system responds to sensor measurements.
The monitoring mode is driven by a novel sensor-agnostic fault detection, exclusion, and integrity monitoring method that minimizes the assumptions on the fault type, all-source sensor composition, and the number of faulty sensors. The validation mode provides a novel method for the online validation of sensors which have questionable sensor models, in a fault-agnostic and sensor-agnostic manner, and without compromising the ongoing navigation solution in the process. The remaining two modes, calibration and remodeling, generalize and integrate online calibration and model identification processes to provide autonomous and dynamic estimation of candidate model functions and their parameters, which when paired with the monitoring and validation processes, directly enable resilient, self-correcting, plug-and-play open architecture navigation systems.
This work was done by Major Juan D. Jurado, USAF, for the Air Force Institute of Technology. For more information, download the Technical Support Package (free white paper) below. AFIT-0005
This Brief includes a Technical Support Package (TSP).

Autonomous and Resilient Management of All-Source Sensors for Navigation Assurance
(reference AFIT-0005) is currently available for download from the TSP library.
Don't have an account?
More From SAE Media Group
Tech Briefs
Vision-Based Approach and Landing System (VALS)
Aerospace & Defense Tech Briefs
Quality Management Experts Provide Guidance on AS9100 Standard, Equipment Calibration
Tech Briefs
WiFi RSSI Sensor Tracker for the ISS
Aerospace & Defense Tech Briefs
GPS Enabled Semi-Autonomous Robot

Aerospace & Defense Tech Briefs
SAE International Extends Call for Abstracts, Seeks Submissions for AeroTech Conference
Aerospace & Defense Tech Briefs
Next Generation Airborne Navigation System
Aerospace & Defense Tech Briefs
Drift Improvement with Reinforcement Training of Inertial Sensors
Aerospace & Defense Tech Briefs
Systems Engineering Approach to Develop Guidance, Navigation and Control Algorithms for Unmanned Ground Vehicle
Tech Briefs
Approach Makes Unmanned Agents Self-Sufficient
Aerospace & Defense Tech Briefs
Optimal UAS Assignments and Trajectories for Persistent Surveillance and Data Collection from a Wireless Sensor Network
Aerospace & Defense Tech Briefs
Real Time Physiological Status Monitoring

Tech Briefs
GPS-Enhanced Onboard Navigation System (GEONS)
Aerospace & Defense Tech Briefs
Localization and Mapping of Unknown Locations with Unmanned Ground Vehicles
Aerospace & Defense Tech Briefs
Industry Invited to Participate in AeroTech Aerospace and Defense Technical Program
Aerospace & Defense Tech Briefs
Autonomous “Wingman” Vehicles
Aerospace & Defense Tech Briefs
Feasibility Analysis of UAV Technology to Improve Tactical Surveillance in South Korea’s Rear Area Operations
Aerospace & Defense Tech Briefs
New University-Led Air Force Center of Excellence Focuses on Securing Autonomous Systems Operating in Contested Environments

Aerospace & Defense Tech Briefs
AIA Predicts Flying Air Taxis, Supersonic Air Travel, and Space Industry for 2050
Aerospace INSIDER
F-22 Pilot Controls Drone With Tablet
Motion Design INSIDER
Wearable Lets Users Control Machines and Robots While on the Move
Tech Briefs
System Helps Drones Detect and Avoid Power Lines
Aerospace & Defense Tech Briefs
AI Co-Pilot Enhances Human Precision for Safer Aviation
Sensor Technology
RTK and Sensor Fusion for Autonomous Vehicle Navigation & Guidance
Tech Briefs
5G, AI Team Up to Optimize Military Fueling
Tech Briefs
Laser-Light-Based Accelerometer
Overview
The dissertation by Major Juan D. Jurado focuses on enhancing navigation assurance through the autonomous and resilient management of all-source sensors. It addresses the critical need for reliable navigation systems, particularly in complex environments where multiple sensor types are utilized. The work is structured into eight chapters, each contributing to a comprehensive understanding of the challenges and advancements in sensor technologies.
Chapter 1 introduces the motivation behind the research, emphasizing the importance of sensor resiliency and integrity in navigation systems. It sets the stage for the subsequent chapters by outlining the objectives and significance of the study.
Chapter 2 provides the mathematical background and notation essential for the dissertation, along with a general overview of statistical modeling, model diagnostics, and methods for estimating navigation solutions. This foundational knowledge is crucial for understanding the methodologies discussed in later chapters.
Chapter 3 develops a general framework aimed at ensuring multi-sensor resiliency, assurance, and integrity in an all-source environment. This framework is pivotal for integrating various sensor inputs and maintaining reliable navigation outputs.
Chapter 4 focuses on all-source fault detection and exclusion, as well as integrity monitoring. These processes are vital for maintaining the accuracy and reliability of navigation systems by identifying and mitigating potential sensor faults.
In Chapter 5, the dissertation discusses advancements in real-time sensor initialization and validation, which are essential for the framework's validation objective. This chapter highlights the importance of ensuring that sensors are correctly initialized and validated to provide accurate data.
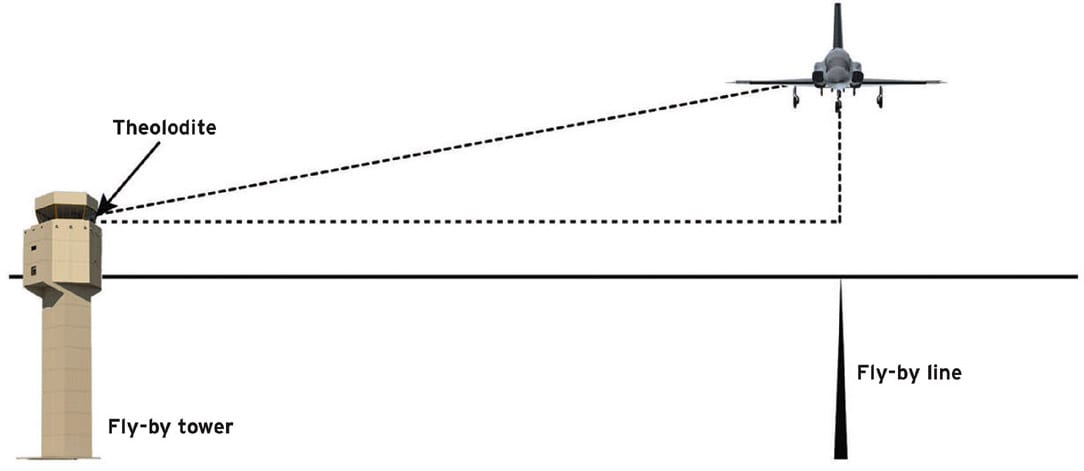
Chapters 6 and 7 present novel algorithms for the calibration of Pitot-static and inertial sensors, respectively. These algorithms are designed to enhance online calibration, ensuring that sensor outputs remain accurate over time.
Finally, Chapter 8 summarizes the research efforts, major findings, and contributions of the dissertation. It also outlines future work in the area of all-source resilient navigation, emphasizing the ongoing need for advancements in sensor management and navigation assurance.
Overall, the dissertation presents a comprehensive approach to improving navigation systems through innovative sensor management techniques, addressing both theoretical and practical aspects of the field.
Top Stories
NewsSensors/Data Acquisition
![]() Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
INSIDERRF & Microwave Electronics
![]() A Next Generation Helmet System for Navy Pilots
A Next Generation Helmet System for Navy Pilots
INSIDERWeapons Systems
![]() New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
NewsAutomotive
![]() Ford Announces 48-Volt Architecture for Future Electric Truck
Ford Announces 48-Volt Architecture for Future Electric Truck
INSIDERAerospace
![]() Active Strake System Cuts Cruise Drag, Boosts Flight Efficiency
Active Strake System Cuts Cruise Drag, Boosts Flight Efficiency
ArticlesTransportation
Webcasts
Aerospace
![]() Cooling a New Generation of Aerospace and Defense Embedded...
Cooling a New Generation of Aerospace and Defense Embedded...
Energy
![]() Battery Abuse Testing: Pushing to Failure
Battery Abuse Testing: Pushing to Failure
Power
![]() A FREE Two-Day Event Dedicated to Connected Mobility
A FREE Two-Day Event Dedicated to Connected Mobility
Automotive
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Electronics & Computers
![]() Advantages of Smart Power Distribution Unit Design for Automotive &...
Advantages of Smart Power Distribution Unit Design for Automotive &...
Unmanned Systems
![]() Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance
Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance