



Using Dempster-Shafer Fusion for Personnel Intrusion Detection
New technique enables the use of ultrasonic micro-doppler and PIR sensors for improved security.
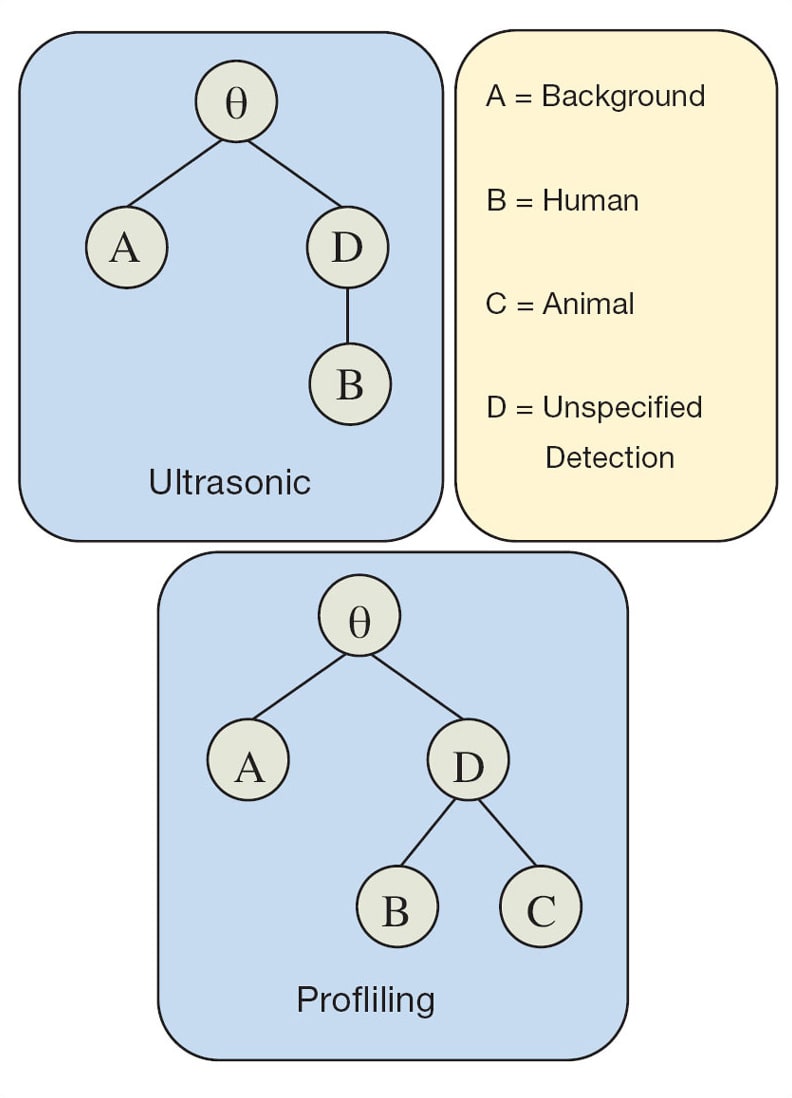
The Dempster-Shafer (D-S) mass function is used in effect as a common representation of heterogeneous sensor data. In order to cast each data source in this form, first the raw data is reduced to points in a multi-dimensional feature space specific to each sensor. From there, an approach is outlined that uses a distance metric in the feature space to assign mass to each state in the class hierarchy. This hierarchy begins with the full frame of discernment which represents complete uncertainty. From there it proceeds as an n-array tree broken down into further subclasses until the finest granularity of classification for the specific sensor is reached.
For an input point to be classified, mass is assigned iteratively down the tree. In doing so, two key steps are taken. First, the uncertainty is estimated as a function of the ratio of the distance between the two closest child nodes. If the input point is deemed equidistant from the child nodes, there is a great deal of uncertainty and the mass function should reflect that. On the other hand, significant disparity indicates a much greater likelihood of one subclass. This distinction leads to the second step, where any mass not assigned to uncertainty is split between the child nodes as a function of the ratio of their distances.
The final result is a representation of the likelihood of each singleton class, as well as all unions of these classes representing uncertain states. These D-S mass functions can now be fused using Dempster's rule of combination, and classification rules can be derived to provide a more robust singular solution.
The preceding approach is derived with simulated data, and subsequently demonstrated on two sensor modalities: an ultrasonic micro-Doppler sensor and a PIR profiling sensor. The ultrasonic sensor is able to extract human motion by identifying the periodicity of a human walker's gait in the sensor field of view. The sensor can distinguish between a human, an unknown object in the scene, and background ambience. On the other hand, the profiling sensor is capable of distinguishing a horse from a human. The sensor forms a 2-D image of height versus time, and from this the orientation and eccentricity of the object are estimated and matched to known distributions of human and horse profiles. These two sensors illustrate the approach on differing hierarchies of class representations.
The Dempster-Shafer theory provides the capability of fusing orthogonal data from an ultrasonic micro-Doppler and PIR sensors. Utilizing two sets of real-world data from these sensors that were collected separately, it is possible to take a hierarchal approach to classification/discrimination through fusion of the disparate information resulting in a series of solutions with a greater confidence in comparison to a standalone sensor solution. The utilization of multiple classes afforded by the Dempster-Shafer theory increases the robustness and quality of the information from the given suite of sensors.
This work was done by Brian McGuire and Sachi Desai of the US Army RDECOM-ARDEC. ARL-0189
This Brief includes a Technical Support Package (TSP).

Dempster-Shafer Fusion for Personnel Detection
(reference ARL-0189) is currently available for download from the TSP library.
Don't have an account?
More From SAE Media Group
Aerospace & Defense Tech Briefs
3D Data Acquisition Platform for Human Activity Understanding
Motion Design
Electronic Skin Sensor Decodes Human Motion
Medical Design Briefs
Deep-Learned E-Skin Decodes Complex Human Motion
Aerospace & Defense Tech Briefs
Real Time Physiological Status Monitoring


Tech Briefs
Wearable Strain Sensor Using Light Transmittance
Aerospace & Defense Tech Briefs
Chemical Hazard Sensor
Tech Briefs
A Step Toward More Accurate 3D Object Detection
Medical Design Briefs
Liquid Metal Sensors and AI Help Prosthetic Hands to ‘Feel’
Motion Design INSIDER
Teaching a Robot to Hang a T-shirt Starts with Data
Tech Briefs
Quantum Error Correction Method
Medical Design Briefs
Sensor Uses Computer Vision-Based Optical Strain Technology
Aerospace & Defense Tech Briefs
A Modular Approach to Video Designation of Manipulation Targets for Mobile Manipulators
Tech Briefs
Approach Makes Unmanned Agents Self-Sufficient
Aerospace & Defense Tech Briefs
Low-Cost Ground Sensor Network for Intrusion Detection

Robotics & Automation INSIDER
AI Yields ‘Athletically Intelligent’ Robotic Dog
Tech Briefs
Soft Robotics Perception System
Photonics & Imaging Technology
Spotting Objects Amid Clutter
Motion Design
Soft Hardware for More Flexible Robots


Tech Briefs
Robot Reads Braille Twice as Fast as Humans
Medical Design Briefs
Sensor-Packed Glove Could Aid Prosthetic Design
Off-Highway Engineering
COMVEC 2022: Hiring Talent to Meet High-Tech Demands
Aerospace & Defense Tech Briefs
Deep Installation Method for Three-Component Seismic Sensors
Tech Briefs
Imitating Human Hands to Make Better Sensors
Motion Design
Insect-Inspired Motion Sensing
Aerospace & Defense Tech Briefs
Adding Context to Full-Motion Video for Improved Surveillance and Situational Awareness
Overview
The document presents a study on the fusion of multi-modal sensor data for personnel intrusion detection, utilizing the Dempster-Shafer theory of evidence. The primary focus is on low-cost, non-imaging sensors, specifically an ultrasonic micro-Doppler sensor and a PIR (Passive Infrared) profiling sensor, which are suitable for applications like border crossings where rapid deployment and low power consumption are critical.
The research highlights the challenges associated with fusing data from sensors that provide varying levels of classification granularity. Some sensors can deliver detailed motion characteristics, enabling fine classifications, while others may only offer basic alerts with minimal detail. To address this disparity, the Dempster-Shafer theory is employed, which effectively manages uncertainty and ambiguous propositions, allowing for a hierarchical approach to data representation.
The ultrasonic micro-Doppler sensor detects human motion by analyzing the periodicity of a person's gait within its field of view. It can differentiate between humans, unknown objects, and background noise. In contrast, the PIR profiling sensor generates a two-dimensional image based on height and time, enabling it to distinguish between different types of objects, such as humans and horses, by estimating their orientation and eccentricity.
The document details the process of fusing data from these two sensors, demonstrating how the Dempster-Shafer theory can enhance classification accuracy and confidence compared to using a single sensor. The fusion of data results in a more robust solution, capable of handling multiple classes and varying confidence levels for different scenarios.
The findings indicate that the application of the Dempster-Shafer theory significantly improves the quality and reliability of information derived from the sensor suite. The paper concludes with a discussion on future directions for this research, emphasizing the potential benefits of enhanced data sets for evaluating the proposed approach.
Overall, this study contributes to the field of multi-sensor data fusion by providing a systematic method for integrating diverse sensor outputs, thereby improving personnel detection capabilities in various operational contexts. The research underscores the importance of addressing uncertainty in sensor data to achieve more accurate and reliable classification outcomes.
Top Stories
INSIDERDefense
![]() New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
NewsAutomotive
![]() Ford Announces 48-Volt Architecture for Future Electric Truck
Ford Announces 48-Volt Architecture for Future Electric Truck
INSIDERManufacturing & Prototyping
![]() Active Strake System Cuts Cruise Drag, Boosts Flight Efficiency
Active Strake System Cuts Cruise Drag, Boosts Flight Efficiency
ArticlesTransportation
![]() Accelerating Down the Road to Autonomy
Accelerating Down the Road to Autonomy
INSIDERMaterials
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
Road ReadyTransportation
Webcasts
Electronics & Computers
![]() Cooling a New Generation of Aerospace and Defense Embedded...
Cooling a New Generation of Aerospace and Defense Embedded...
Power
![]() Battery Abuse Testing: Pushing to Failure
Battery Abuse Testing: Pushing to Failure
Connectivity
![]() A FREE Two-Day Event Dedicated to Connected Mobility
A FREE Two-Day Event Dedicated to Connected Mobility
Automotive
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Quiet, Please: NVH Improvement Opportunities in the Early Design Cycle
Transportation
![]() Advantages of Smart Power Distribution Unit Design for Automotive &...
Advantages of Smart Power Distribution Unit Design for Automotive &...
Aerospace
![]() Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance
Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance