



Advances and Challenges in Developing Radar Applications
Significant advances in digital and RF/microwave technologies are leading to more diverse radar applications as well as greater commercialization. This article discusses some of the fundamental research and development challenges in both the digital and RF/millimeter-wave domains, as well as current and future directions in design, system integration, and test.
Radar is used to detect and/or track target objects and their attributes, such as range, speed, and other information obtained through signals at RF and microwave frequencies. The broad classes of radar systems are active and passive (Figure 1). Passive radar systems use non-cooperative source(s) of illumination, such as a target’s emitted signals, broadcast signals, or cellular communication signals, to obtain information about the target. Since radar performance relies on the sensing capabilities of the receiver, significant innovations have been made in areas such as phased array antennas, digital beam-forming, detection algorithms, and source separation algorithms. Active radar uses cooperative sources of illumination by generating its own signal(s) to illuminate the target. Within the class of active radar, there is monostatic radar, where the signal source is collocated with the receiver, and multistatic radar, where there are two or more receiver locations.

Among active radar systems, there are several common signal types. The most basic is continuous wave (CW) radar, where a constant frequency sinusoidal signal is transmitted. The CW signal allows the receiver to detect phase/frequency variations (Doppler shift) from the target reflection. Unless a special provision for absolute time marker is used, however, range detection is not possible. A modified CW signal using a stepped frequency modulated (SFM) signal obtains a better range estimate by hopping over multiple discrete frequencies. A further modification of the CW signal to linearly ramp up and down a range of frequencies is called linear frequency modulation (LFM) or frequency modulated CW (Figure 2). An LFM radar allows detection of Doppler as well as range by observing the frequency difference of the time-delayed received signal from the transmitted signal. If a stationary object is detected, a constant beat frequency (transmit to receive frequency difference) is observed.
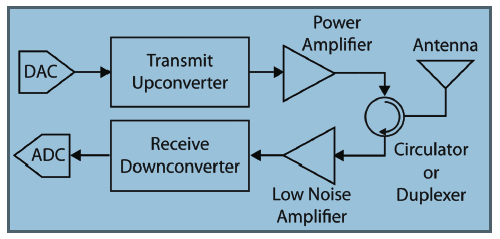
Without loss of generality, today’s active radar system design can be broken into two major components: the baseband signal processing and the RF/microwave front end (including the antenna). Figure 3 shows a high-level block diagram of an active radar system.
Digital Signal Processing


RF/Microwave Front End
The transmitter and receiver unit (Figure 4) plays a key role in acquiring the information for processing. Many radar systems today operate at S-Band (2 to 4 GHz), X-Band (8 to 12 GHz), and higher. Design choices for the transmitter upconverter and receiver downconverter depend on many factors, such as the target frequency range, available local oscillators, interfaces to the DAC and ADC, phase/amplitude control, and cost. Perhaps the most heavily researched areas are high power amplifier (HPA) and low noise amplifier (LNA) design.

Integration: Putting it All Together

Conclusion
Today’s radar systems are as complex as they are diverse. What is common, however, is that they each contain a digital signal processing section and RF/microwave front end. In this article, we looked at a few key elements in both of these areas with examples for pulse compression radar and discussed several technology challenges as well. While radar systems previously were developed by a few hardware engineers, today’s systems often rely on the design contributions of multiple domain experts. Various software tools simplify the complexity of the design process and allow engineers to think across the traditional boundaries.
This article was written by Dr. Takao Inoue, Senior RF Platform Engineer, and Phyllis Cosentino, Senior Product Marketing Manager, at National Instruments in Austin, TX. For more information, Click Here.
References
- M. Grossi, A. Fiorello and S. Pagliai, “Advances in Radar Systems by SELEX Sistemi Integrati: Today and Towards the Future,” European Radar Conference Proceedings, September-October 2009, pp. 310-317.
- J. Hasch, E. Topak, R. Schnabel, T. Zwick, R. Weigel and C. Waldschmidt, “Milli meter-Wave Technology for Auto motive Radar Sensors in the 77 GHz Frequency Band,” IEEE Transactions on Microwave Theory and Techniques, Vol. 60, No. 3, March 2012, pp. 845, 860.
- C. Li, J. Cummings, J. Lam, E. Graves and W. Wu, “Radar Remote Monitoring of Vital Signs,” IEEE Microwave Magazine, Vol. 10, No. 1, February 2009, pp. 47-56. C. Gentner, E. Munoz, M. Khider, E. Staudinger, S. Sand and A. Dammann, “Particle Filter Based Positioning With 3GPP-LTE in Indoor Environments,” IEEE/ION Position Location and Navigation Symposium Proceedings, April 2012, pp. 301, 308
More From SAE Media Group
Tech Briefs
Test Strategies to Track Hypersonic Threats
Aerospace & Defense Tech Briefs
Making AESA Radar More Flexible
Aerospace & Defense Tech Briefs
Validation of Ubiquitous 2D Radar
Aerospace & Defense Tech Briefs
New Pulse Analysis Techniques for Radar and EW
Aerospace & Defense Tech Briefs
Unmanned Ground Vehicle Communications Relays
Aerospace & Defense Tech Briefs
Solid-State Microwave Power Module
Aerospace & Defense Tech Briefs
Enhancing Mission Readiness with Rugged Portable Instruments
Aerospace & Defense Tech Briefs
New RF Strategies for Software Radio
Aerospace & Defense Tech Briefs
Development of a 94 GHz Radar System for Dedicated Bird Detection at Airports and Airfields
Aerospace & Defense Tech Briefs
Developing New Anti-Drone Radar Technology
Aerospace & Defense Tech Briefs
Bringing RF into the Embedded World: It's Time
Aerospace & Defense Tech Briefs
Tracking WiFi Signals to Passively See Through Walls
Aerospace & Defense Tech Briefs
Digital Radar Warning Receiver
Aerospace & Defense Tech Briefs
Optimizing DSP Techniques for Antenna Site Software Radio

Aerospace & Defense Tech Briefs
How to Specify and Select RF Filters
Aerospace & Defense Tech Briefs
Stepped-Frequency Distributed Radar for Through-the-Wall Sensing
Aerospace & Defense Tech Briefs
Broadband 1.2- and 2.4-mm Gallium Nitride (GaN) Power Amplifier Designs
Aerospace & Defense Tech Briefs
RF FPGAs for Multi-Function Systems
Aerospace & Defense Tech Briefs
Ka-Band Front-End Monolithic Microwave Integrated Circuits (MMICs) and Transmit/Receive (T/R) Modules Testing
Aerospace & Defense Tech Briefs
90° Hybrid Coupled Power Amplifier – Pros and Cons
Aerospace & Defense Tech Briefs
Making Fully Digital Beamforming for Radar and Electronic Warfare Applications a Reality
Aerospace & Defense Tech Briefs
NeXtRAD SDR Interface
Aerospace & Defense Tech Briefs
Developing Secondary Surveillance Radar Automated Test Equipment
Aerospace & Defense Tech Briefs
Next-Generation Phased Radar Systems Lead to Hardware Improvements
Aerospace & Defense Tech Briefs
Using High Bandwidth Oscilloscopes to Analyze Radar and Electronic Warfare Systems
Aerospace & Defense Tech Briefs
Solving Military Satellite, Radar and 5G Communications Challenges with GaN-on-SiC MMIC Power Amplifiers
Aerospace & Defense Tech Briefs
SDR Interface for the NeXtRAD Multistatic Radar System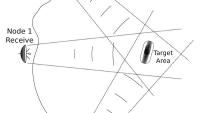
Aerospace & Defense Tech Briefs
An Integrated Framework for Complex Radar System Design
Aerospace & Defense Tech Briefs
SIRE: A MIMO Radar for Landmine and IED Detection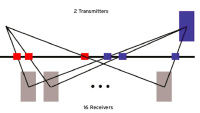
Top Stories
INSIDERAerospace
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
NewsAutomotive
![]() Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
INSIDERManufacturing & Prototyping
![]() A Next Generation Helmet System for Navy Pilots
A Next Generation Helmet System for Navy Pilots
INSIDERDefense
![]() New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
ArticlesAR/AI
![]() Accelerating Down the Road to Autonomy
Accelerating Down the Road to Autonomy
Road ReadyDesign
Webcasts
Transportation
![]() Advantages of Smart Power Distribution Unit Design for Automotive...
Advantages of Smart Power Distribution Unit Design for Automotive...
Automotive
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design...
Quiet, Please: NVH Improvement Opportunities in the Early Design...
Defense
![]() Cooling a New Generation of Aerospace and Defense Embedded...
Cooling a New Generation of Aerospace and Defense Embedded...
Power
![]() Battery Abuse Testing: Pushing to Failure
Battery Abuse Testing: Pushing to Failure
Internet of Things
![]() A FREE Two-Day Event Dedicated to Connected Mobility
A FREE Two-Day Event Dedicated to Connected Mobility
Energy
![]() Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance
Sesame Solar's Nanogrid Tech Promises Major Gains in Drone Endurance