



Target Detection and Classification Using Seismic and PIR Sensors
Unattended ground sensors can detect and discriminate humans, animals, and vehicles from other targets.
Unattended ground sensors (UGS) are widely used in industrial monitoring and military operations. Such UGS systems are usually lightweight devices that automatically monitor the local activities in-situ, and transfer target detection and classification reports to the processing center at a higher level of hierarchy. Commercially available UGS systems make use of multiple sensing modalities (e.g., acoustic, seismic, passive infrared, magnetic, electrostatic, and video). Efficacy of UGS systems is often limited by high false alarm rates because the onboard data processing algorithms may not be able to correctly discriminate different types of targets (e.g., humans from animals). For example, discriminating human footstep signals from other targets and noise sources is a challenging task, because the signal-to-noise ratio (SNR) of footsteps decreases rapidly with the distance between the sensor and the pedestrian.
Although passive infrared (PIR) sensors have been used for detection and localization of moving targets, similar efforts for target classification have not been reported. This work makes use of a wavelet-based feature extraction method, called Symbolic Dynamic Filtering (SDF). The SDF-based feature extraction algorithm mitigates the noise by using wavelet analysis, captures the essential signatures of the original signals in the time-frequency domain, and generates robust low-dimensional feature vectors for pattern classification. The objective is to detect and classify different targets, where seismic and PIR sensors are used to capture the characteristic signatures. For example, in the movement of a human or an animal across the ground, oscillatory motions of the body appendages provide the respective characteristic signatures.
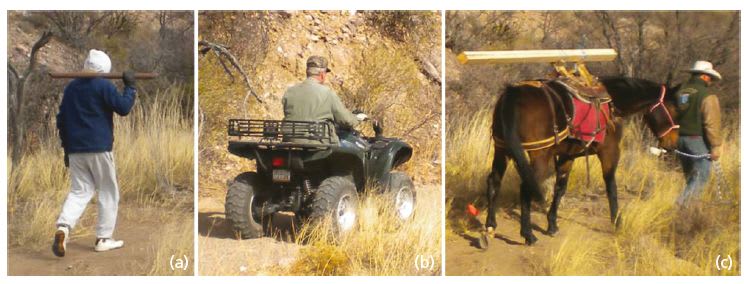
Seismic and PIR sensor data were collected on multiple days from test fields on a wash (the dry bed of an intermittent creek) and at a choke point (a place where the targets are forced to go due to terrain difficulties). During multiple field tests, sensor data were collected for several scenarios that consisted of targets walking along an approximately 150-meter-long trail, and returning along the same trail to the starting point.
The targets consisted of humans (male and female), animals (donkeys, mules, and horses), and all-terrain vehicles (ATVs). The humans walked alone and in groups with and without backpacks; the animals were led by their human handlers, and they made runs with and without payloads; and ATVs moved at different speeds (5 mph and 10 mph). There were three sensor sites, each equipped with seismic and PIR sensors. The seismic sensors (geophones) were buried approximately 15 cm deep underneath the soil surface, and the PIR sensors were collocated with the respective seismic sensors. All targets passed by the sensor sites at a distance of approximately 5 m. Signals from both sensors were acquired at a sampling frequency of 10 kHz.
In order to test the capability of the proposed algorithm for target detection, another data set was collected with no target present. The problem of target detection is then formulated as a binary pattern classification, where no target present corresponds to one class, and target present (i.e., human, vehicle or animal) corresponds to the other class. The data sets, collected by the channel of seismic sensors that are orthogonal to the ground surface and the PIR sensors that are collocated with the seismic sensors, are used for target detection and classification. For computational efficiency, the data were down-sampled by a factor of 10 with no apparent loss of information.
Similar with the movement type identification shown above, the target payload information can also be derived by performing another binary classification for both animal and human targets. The feature vectors extracted by SDF has large inter-class separation while small intra-class variance, and yet the intraclass differences between the with-payload and without-payload cases are still distinguishable.
Seismic and PIR sensors have their own advantages and disadvantages for target detection and classification. The seismic sensor is omni-directional and has a long range of detection, whereas a PIR sensor has a limited field of view (less than 180 ), which restricts the sensor from detecting target moving behind it. The seismic sensor is not site-independent and is vulnerable to variations in sensor sites, whereas a PIR sensor merely passively accepts the incoming infrared radiation and is independent of the sensor site. In order to improve the detection and classification accuracy while reducing the false alarm rate, it is recommended that the seismic and PIR sensor should be used together to provide complementary information to each other. Information fusion techniques are needed to combine the outputs of the two sensing modalities.
This work was done by Thyagaraju Damarla of the Army Research Laboratory; Xin Jin, Asok Ray, and Soumalya Sarkar of Pennsylvania State University; and Shalabh Gupta of the University of Connecticut. ARL-0147
This Brief includes a Technical Support Package (TSP).

Target Detection and Classification Using Seismic and PIR Sensors
(reference ARL-0147) is currently available for download from the TSP library.
Don't have an account?
More From SAE Media Group

Aerospace & Defense Tech Briefs
Robust Quantum Sensors Program

Tech Briefs
Hail Monitor Sensor



Tech Briefs
Ka-Band Radar Terminal Descent Sensor

Aerospace & Defense Tech Briefs
Distributed Fiber Optic Sensing for Homeland Security

Aerospace & Defense Tech Briefs
Modular, Portable, and Reconfigurable Wireless Sensing System
Tech Briefs
AI Helps UAVs Predict Oncoming Turbulence
Aerospace & Defense Tech Briefs
This Laser Clock Could Transform Satellite Navigation Accuracy
RF & Microwave Technology
Antenna Electronically Steered Using MEMS Phase Shifters
Tech Briefs
When Mushrooms Control Robots
Photonics & Imaging Technology
Researchers Use Inkjet Printing to Make a Portable Multispectral 3D Camera

Aerospace & Defense Tech Briefs
Frangible Polymer Circuit Acts as Tamper Sensor
Tech Briefs
An Automated Flying-Insect Detection System
Tech Briefs
Acoustical-Sensor Assemblies for Use in Flows

Aerospace & Defense Tech Briefs
Fiber-Optic Seismic Sensor for Unattended Ground Sensing

Aerospace & Defense Tech Briefs
Characterization of a MEMS Directional Sound Sensor



Overview
The document presents a research report focused on target detection and classification using seismic and passive infrared (PIR) sensors, particularly in the context of unattended ground sensors (UGS). The report, dated April 20, 2012, outlines the challenges faced by UGS systems, such as high false alarm rates, which can stem from inadequate algorithms and computational limitations.
To address these issues, the authors propose a wavelet-based method for target detection and classification, which has been validated using data sets from seismic and PIR sensors. This method is designed to effectively identify various targets, including humans, animals, and all-terrain vehicles (ATVs), by capturing their characteristic signatures through sensor data. The report emphasizes the advantages of the proposed method, including fast execution times and low memory requirements, making it suitable for real-time implementation in UGS systems.
The paper is structured into several sections. It begins with a problem description and formulation, detailing the objective of detecting and classifying different targets based on their movement patterns. The authors describe the experimental setup, where sensor data were collected over multiple days from test fields, including scenarios where targets walked along a designated trail. The targets included individuals (both male and female), animals (such as donkeys and horses), and ATVs, which were tested under various conditions, including different speeds and payloads.
The report highlights the major contributions of the research, including the formulation of a hierarchical structure for target detection and classification, experimental validation of the feature extraction method, and performance evaluation of the sensors in identifying target payloads and movement types. The findings indicate that the proposed wavelet-based method can significantly enhance the efficacy of UGS systems in monitoring and detecting human activities in secure regions.
In conclusion, the document provides a comprehensive overview of the research conducted at Pennsylvania State University, showcasing advancements in sensor technology and algorithms that could improve the reliability and effectiveness of unattended ground sensors in various applications, including security and surveillance. The report also suggests directions for future research to further enhance these systems.
Top Stories
INSIDERManufacturing & Prototyping
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
INSIDERManned Systems
![]() FAA to Replace Aging Network of Ground-Based Radars
FAA to Replace Aging Network of Ground-Based Radars
NewsTransportation
![]() CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
NewsSoftware
![]() Accelerating Down the Road to Autonomy
Accelerating Down the Road to Autonomy
EditorialDesign
![]() DarkSky One Wants to Make the World a Darker Place
DarkSky One Wants to Make the World a Darker Place
INSIDERMaterials
![]() Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Webcasts
Defense
![]() How Sift's Unified Observability Platform Accelerates Drone Innovation
How Sift's Unified Observability Platform Accelerates Drone Innovation
Automotive
![]() E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
Power
![]() Hydrogen Engines Are Heating Up for Heavy Duty
Hydrogen Engines Are Heating Up for Heavy Duty
Electronics & Computers
![]() Advantages of Smart Power Distribution Unit Design for Automotive...
Advantages of Smart Power Distribution Unit Design for Automotive...
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design...
Quiet, Please: NVH Improvement Opportunities in the Early Design...