



Two-Camera Imaging System for Kinematic Measurements
The system can be used for kinematic testing of models of underwater or aerial vehicles.
A high-speed imaging system has been devised as a noninvasive means of collecting data on the kinematics of working models of developmental underwater or aerial vehicles that would utilize flapping fins or flapping wings for propulsion. The system includes two high-speed digital electronic cameras aimed along orthogonal axes that acquire snapshots of a model simultaneously in rapid succession. The data from successive images are postprocessed to obtain three-dimensional coordinates of points of interest on the model as functions of time. In the case of a flapping appendage, the points of interest are tips on the appendage, and the temporal evolution of the tip coordinates through multiple flapping cycles is utilized, in conjunction with computational fluid dynamics and other analytical tools, in an iterative process of testing and design directed toward improving the swimming or flying performance of the model. The system can, of course, be used as a noninvasive means of kinematic testing of models other than those of vehicles utilizing flapping appendages.
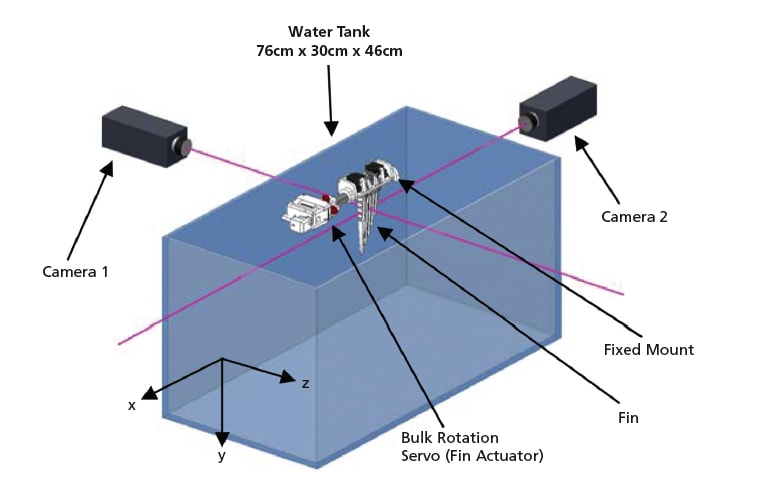
The cameras are positioned outside a tank wherein the model is mounted (see figure). The cameras are triggered to acquire images simultaneously, and are capable of acquiring as many as 10,000 frames per second. For the original flapping-fin application, a frame rate of about 50 times the flapping frequency is sufficient to capture the required kinematic information. The camera outputs are stored in a computer hard drive.
During postprocessing, the images acquired by the two cameras are displayed side by side, and in a manual procedure, the user selects the point(s) of interest in the two images. Then the system software implements a least-squares-best-fit linear transformation that converts the two-dimensional pixel coordinates of the selected points to three-dimensional coordinates. The transformation requires calibration data, which must be obtained in a separate prior set of similar observations of still three-dimensional targets (e.g., assemblies of blocks) that provide a sufficiently dense array of points having known three-dimensional coordinates distributed throughout the volume of interest.
The cameras are mounted on pivots on a framework of slider bars, so that their positions and viewing angles can be adjusted for different tests, subject to an overriding requirement to keep their lines of sight orthogonal. A new calibration must be performed whenever the cameras are moved to new positions.
This work was done by Jason Geder, William C. Sandberg, and Ravi Ramamurti of the Naval Research Laboratory.
NRL-0027
This Brief includes a Technical Support Package (TSP).
Two-Camera Imaging System for Kinematic Measurements
(reference NRL-0027) is currently available for download from the TSP library.
Don't have an account?
More From SAE Media Group
Photonics & Imaging Technology
Researchers Use Inkjet Printing to Make a Portable Multispectral 3D Camera
Motion Design INSIDER
Computer Simulation Accurately Models Moving Cars
Software Tech Briefs
Electrical Calibration Source for Next-Generation Oscilloscope
Motion Design INSIDER
Programming Robots with Rubber Bands
Aerospace & Defense Tech Briefs
Robot Vision System for Precise Object Retrieval in Unmanned Systems

Aerospace & Defense Tech Briefs
Scientists Fuse Simulations and Machine Learning to Accelerate Novel Additively Manufactured Materials
Motion Design INSIDER
AI Shapes Autonomous Underwater “Gliders”
Motion Design INSIDER
Tiny Fans on the Feet of Water Bugs Could Lead to Energy Efficient Mini Robots
Motion Design
Flexible Conductive Skin Gives Robots the Human Touch
Tech Briefs
Fighting Fire with Electrically Assisted Wind


Motion Design INSIDER
Are Shapeshifting “Soft Machines” In Our Future?
Robotics & Automation INSIDER
Researchers Explore the Phenomenon of Holonomy

Tech Briefs
PGUOM Can Block Noise Without Blocking Air
Aerospace & Defense Tech Briefs
New Drone Will Mimic Albatross Flight

Tech Briefs
A Color-Based Sensor Emulates Skin’s Sensitivity
Tech Briefs
A Robot with the ‘Brains’ to Morph Mid-Air
Tech Briefs
An Octopus-Inspired Smart Robot
Motion Design
A Hopping Robot That Can Leap and Land Like a Squirrel

Aerospace & Defense Tech Briefs
Robust Quantum Sensors Program
Imaging Technology
Stereoscopic Machine-Vision System Using Projected Circles
Tech Briefs
Microparticle Flow Sensor
Aerospace & Defense Tech Briefs
System for Imaging Turbulent Combustion Flows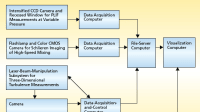
Aerospace & Defense Tech Briefs
Considerations of Aeroacoustics in Turbojet-Engine Testing
Tech Briefs
Quantum Leap in Material Science
Overview
The document titled "Multi-Camera, High-Speed Imaging System for Kinematics Data Collection" presents a research project conducted by the Naval Research Laboratory, focusing on the design and development of unmanned underwater vehicles (UUVs). The project emphasizes the use of biological inspiration in engineering, particularly in the design of propulsion and control mechanisms to enhance efficiency, stealth, and maneuverability.
The introduction highlights the growing trend of biomimicry in UUV design, citing examples such as the use of insect wing flapping and fish locomotion studies to inform the design of fins and wings. The report outlines the development of a multi-camera system specifically designed to capture high-speed images of flapping fins and wings, enabling researchers to analyze kinematics in detail.
The imaging system consists of two high-speed cameras capable of capturing up to 10,000 frames per second. Each camera is connected to a computer via Ethernet, allowing for the real-time transmission of recorded images. The cameras are calibrated using direct linear transforms to convert image coordinates into a three-dimensional coordinate system, facilitating precise tracking of points of interest on the appendages during flapping cycles.
The document details the experimental setup, including the test tank and the use of load and torque cells to measure forces generated by the flapping motions. The kinematic data collected is compared against desired performance metrics, and adjustments are made to improve the design and functionality of the appendages.
Additionally, the report discusses the integration of force measurements obtained from experiments with computational fluid dynamics simulations, providing a comprehensive understanding of the forces at play during the flapping motion. This dual approach enhances the accuracy of the kinematic analysis and supports the optimization of the vehicle designs.
The findings from this research contribute to the broader field of biomimetic design, offering insights that can lead to more efficient and effective underwater vehicles. The document concludes with a discussion of the adaptability of the imaging system and its potential applications in various fields, including robotics and fluid dynamics.
Overall, this report serves as a valuable resource for researchers and engineers interested in the intersection of biology and technology, particularly in the context of underwater vehicle design and kinematics analysis.
Top Stories
INSIDERManufacturing & Prototyping
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
INSIDERManned Systems
![]() FAA to Replace Aging Network of Ground-Based Radars
FAA to Replace Aging Network of Ground-Based Radars
NewsTransportation
![]() CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
NewsSoftware
![]() Accelerating Down the Road to Autonomy
Accelerating Down the Road to Autonomy
EditorialDesign
![]() DarkSky One Wants to Make the World a Darker Place
DarkSky One Wants to Make the World a Darker Place
INSIDERMaterials
![]() Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Webcasts
Defense
![]() How Sift's Unified Observability Platform Accelerates Drone Innovation
How Sift's Unified Observability Platform Accelerates Drone Innovation
Automotive
![]() E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
Power
![]() Hydrogen Engines Are Heating Up for Heavy Duty
Hydrogen Engines Are Heating Up for Heavy Duty
Electronics & Computers
![]() Advantages of Smart Power Distribution Unit Design for Automotive...
Advantages of Smart Power Distribution Unit Design for Automotive...
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design...
Quiet, Please: NVH Improvement Opportunities in the Early Design...