



A Connected Approach to Auxiliary Battery Control
An ‘intelligent’ systems strategy ensures that an electrified vehicle’s auxiliary battery has enough energy to meet basic loads, whether the vehicle is running or in park.

As vehicles become electrified and more “intelligent,” the energy consumption of the auxiliary system increases rapidly. The auxiliary battery, typically a 12V unit, acts as the backbone of the system to support the proper operation of the vehicle. It is important to ensure the auxiliary battery has enough energy to meet the basic loads, regardless of the vehicle being in park or running. However, existing methods only focus on auxiliary energy management when the vehicle is in a dynamic event.

To fill the gap, an intelligent strategy is proposed that detects a low state of charge (SoC) condition. The strategy would temporarily turn down the auxiliary loads based on their priorities and charge the auxiliary battery at the maximum efficiency. This proposed strategy would allow the vehicle to make intelligent decisions on charging the auxiliary battery.
As a result, the energy consumption remains low while the SoC of the auxiliary battery is sustained. Since the auxiliary load represents an important part of energy consumption in the vehicle, an optimal energy management strategy for the Auxiliary Power Unit (APU) is necessary.

The auxiliary system architecture for HEVs (Fig. 1) may vary depending upon which hybrid architecture is used. When the Auxiliary Battery Management System (ABMS) detects the SoC of the auxiliary battery is low, it passes that information to Powertrain (PCM) via the Body Control Module (BCM). The PCM then commands the APU to start converting energy from the high voltage (HV) battery into the auxiliary battery.
Auxiliary battery load categories
There are various loads applied on the auxiliary battery; they are classified into six categories. Continuous key-on loads include loads when the vehicle is turned on. Transient loads represent the loads that are needed only for a specific event. The loads for OBD testing are related to the loads used to satisfy regulatory requirements. The loads for vehicle safety and performance represent loads associated with safety and performance, respectively. The continuous key-on loads differ from the continuous key-off loads because the amplitude of these loads is generally greater than the amplitude of these loads during key-off.
This study focuses on two vehicle use cases: the continuous key-on loads and the continuous key-off loads. These two categories of loads are selected because they are more relevant to the APU strategy.
Control strategy for three vital functions

The proposed strategy has three functions: low SoC detection, auxiliary load prioritization, and auxiliary battery charging.
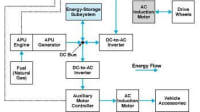
Fig. 2 illustrates a high-level power and communication diagram of the proposed strategy. The vehicle is assumed to be under a charging event. The ABMS detects the SoC if the auxiliary battery falls under a SoC threshold. After that, the BCM passes that information from the ABMS to the PCM. The PCM then turns off the loads based on their priorities. The PCM also commands the APU to start transferring energy from the HV battery into the auxiliary battery.
Fig. 3 presents the flowchart of the proposed strategy. It is important to point out that the park duration in the dashed block is only applicable to the key-off use cases. The SoC low threshold is used to determine whether the SoC of the auxiliary battery will fall under a SoC threshold. If that is the case, the next step is to determine if any of the loads can be turned off based on the load priorities.
Following that procedure, the APU gets turned on to recharge the auxiliary battery. Depending on the SoC, some of the loads are turned back on also based on their priorities. When the SoC high threshold is reached, the APU stops recharging the auxiliary battery.
The low SoC detection for vehicle key-on use case begins once the vehicle starts. The PCM continues receiving CAN signals such as auxiliary battery, SoC and voltage from the ABSM. As the auxiliary loads draw power from the auxiliary battery, the SoC decreases. Once the SoC drops below the SoC low threshold (e.g., 10%), the low SoC condition is determined. Otherwise, the PCM continues monitoring these CAN signals.
Six load categories

Six categories of auxiliary loads have been defined in Table 1. The first five categories are applicable for this key-on use case. The priorities for these five categories from high to low are: 1. Continuous key-on loads; 2. vehicle safety operation; 3. OBD testing; 4. transient loads, and 5. vehicle performance.
The continuous key-on loads have the highest priority because they provide the fundamental functions for any of the vehicle functions at the higher levels. Following that, the loads that support vehicle safety operation are ranked second. The loads for OBD testing are ranked third and are required by regulations. Transient loads such as those from HVAC are considered more important than the loads for vehicle performance because they provide basic driving experience. The loads to support vehicle performance are ranked the last as they are optional for driving the vehicle.
Ideally, all five categories of loads should be satisfied. However, when making a trade-off between energy consumption reduction and maximum performance, some of the loads could be temporarily and/or conditionally turned off.
APU charging strategy for key-on use case
To help explain the optimal charging strategy proposed in this paper, Fig. 4 illustrates the relationship between the APU efficiency and the percent of APU load over its maximum load. It is observed that the maximum efficiency is 92% between 50% and 60% of the maximum APU load. Therefore, the operating range of the APU is selected so it works at its maximum efficiency whenever possible.
For instance, if the sum of the loads requires the APU to operate above 60% of its maximum load, the low priority loads will be temporarily turned off to allow the APU to charge the auxiliary battery while operating at its maximum efficiency. If the sum of the loads is less than the current provided by the APU, the APU will also work at its most efficient operating point. As a trade-off, the charging time is extended.
Once the SoC of the auxiliary battery reaches approximately 95%, the APU turns off. The SoC high is selected to be less than 100% because the APU works in constant voltage mode. Thus, the APU load is reduced as the auxiliary battery gets fully charged. To avoid operating at low efficiency, the SoC high is selected at the point where the APU load hasn’t dropped dramatically.
Low SoC detection for key-off use case
In a vehicle key-off use case, the low SoC condition can result from the vehicle being parked for a long time or some fault of the continuous loads. Also, the low SoC condition can happen if some of the ECUs don’t ‘fall asleep’ after completing OBD tests. Whether an ECU falls asleep can be determined by its communication status.
Unlike the low SoC detection for the key-on use case, the detection for the key-off use case begins once the vehicle shuts down. As illustrated in Fig. 3, the PCM may get a message from the cloud indicating how many days the vehicle will be left in park. The park duration may get updated later if the owner of the vehicle changes his or her plan. With the park duration and the current SoC, the PCM determines if the energy left in the auxiliary battery is enough to get the vehicle ready to drive when the owner returns. If not, the PCM continues monitoring CAN signals such as auxiliary battery SoC and voltage from the ABSM.
As the auxiliary loads draw power from the auxiliary battery, the SoC decreases over time. Once the SoC drops below the SoC low threshold (e.g., 10%), the low SoC condition is determined. Otherwise, the PCM continues monitoring these CAN signals.
Prioritizing auxiliary loads for key-off
Similarly, the categories of loads are ranked for the key-off use case. Instead of having five rankings, this use case only has three: continuous key-off loads; OBD testing, and transient loads.
The continuous key-off loads that are much less the continuous key-on loads replace the continuous key-on loads. The loads for OBD testing are ranked as the second. The OBD tests are obligatory due to regulatory requirements. The transient loads such as HVAC are ranked last. They are necessary for achieving and possibly exceeding the life target of the vehicle. However, they are not as important as the other two categories of loads.
The APU charging strategy for vehicle key-off use case is the same as the charging strategy for the key-on use case. The difference comes in with the amplitude of the loads. The loads during key-off are significantly less than the loads during key-on. The charging strategy still adjusts the operating point of the APU to ensure it only works at its maximum efficiency.

With more offering of drive-assist functionality by vehicle manufacturers, there is increasing pressure on auxiliary battery to improve its efficiency and implement more advanced energy management strategy to maintain SoC during vehicle operations. As such, we propose this strategy to detect low SoC condition, prioritize auxiliary loads as required and effectively manage charging of the auxiliary battery by APU at high operating efficiency level during the key-on and key-off use cases.
Vivek Kumar is a vehicle controls engineer at Ford Motor Co. His specialized research focuses on diesel, gas, hybrid / BEV controls and algorithms. He is also an associate editor for the SAE International Journal of Engines. He can be reached at
More From SAE Media Group
Automotive Engineering
ACeDrive Consortium Plans More Efficient EV Powertrain
Off-Highway Engineering
Narrower Focus, Bigger Payoff for Commercial EVs
Off-Highway Engineering
Yanmar, ELEO Announce Electrification Strategy for Off-Highway Sector
Automotive Engineering
GM: Ultium Heat-Pump System Boosts EV Range, Reduces Charge Times
Battery & Electrification Technology
Ultracapacitor Solutions to Address Energy-Storage Needs of Vehicles
ADAS & Autonomous Vehicle Engineering
Finding Range Through Compute Efficiency
Automotive Engineering
BMW Plans Move to Structural Battery Packs and ‘46120’ Cells
Off-Highway Engineering
The Case for 48V in Commercial Vehicles
Automotive Engineering
48V Is Coming, and Not Just for EVs
Off-Highway Engineering
Kalmar Launches 3rd-Gen Electric Terminal Tractor
Autonomous Vehicle Engineering
Creating Safe, Reliable Circuits for Next-Gen EVs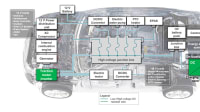
Off-Highway Engineering
Overcoming EV Drivetrain Testing Challenges

Automotive Engineering
Balancing the ‘Dominos’ in EV Thermal Management
Automotive Engineering
Intertek Rethinks the EV Test Facility
Automotive Engineering
Inside GM’s Expanded Electric-Vehicle Battery Lab
Automotive Engineering
Tackling the Thermal Challenges of Battery EVs
Off-Highway Engineering
CES 2025: Cat Debuts Hybrid-Electric Retrofit on 972 Wheel Loader
Automotive Engineering
For Aptiv, More EVs Mean More Profit with SVA
Automotive Engineering
Proving out DC Fast Charging — in the Extreme
Off-Highway Engineering
Battery Innovation Key for Commercial and Off-Highway EVs
Automotive Engineering
A Resonant Solution for Fast, Flexible EV Charging
Battery & Electrification Technology
Powering Light Electric Vehicles
Automotive Engineering
Clarios Sees Low-Voltage Electricals as Vital in EV, AV Future
Off-Highway Engineering
Quantron Launches 12-M Battery-Electric Bus; Fuel-Cell Variant to Follow
Off-Highway Engineering
Challenges and Opportunities of Electrifying Off-Highway Machines
Automotive Engineering
Is GaN the Future for EV Chips?
Off-Highway Engineering
Battery of Issues Surrounds Large-Vehicle Electrification
Automotive Engineering
Toward an Electric Two-Wheeled Triumph
Top Stories
INSIDERAerospace
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
NewsUnmanned Systems
![]() Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
Microvision Aquires Luminar, Plans Relationship Restoration, Multi-industry Push
INSIDERRF & Microwave Electronics
![]() A Next Generation Helmet System for Navy Pilots
A Next Generation Helmet System for Navy Pilots
ArticlesUnmanned Systems
![]() Accelerating Down the Road to Autonomy
Accelerating Down the Road to Autonomy
INSIDERDesign
![]() New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
New Raytheon and Lockheed Martin Agreements Expand Missile Defense Production
ArticlesUnmanned Systems
![]() CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
Webcasts
Transportation
![]() Advantages of Smart Power Distribution Unit Design for Automotive...
Advantages of Smart Power Distribution Unit Design for Automotive...
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design...
Quiet, Please: NVH Improvement Opportunities in the Early Design...
Defense
![]() Cooling a New Generation of Aerospace and Defense Embedded...
Cooling a New Generation of Aerospace and Defense Embedded...
Test & Measurement
![]() Battery Abuse Testing: Pushing to Failure
Battery Abuse Testing: Pushing to Failure
Automotive
![]() A FREE Two-Day Event Dedicated to Connected Mobility
A FREE Two-Day Event Dedicated to Connected Mobility