



Covariance and Uncertainty Realism in Space Surveillance and Tracking
Characterizing uncertainty in estimating the state of a resident space object is one of the fundamentals of many space surveillance tasks.
The characterization of uncertainty in the estimate of the state of a resident space object is fundamental to many space surveillance tasks including data association, uncorrelated track (UCT) resolution, catalog maintenance, sensor tasking and scheduling, as well as space situational awareness (SSA) missions such as conjunction assessments and maneuver detection. Generally, uncertainties are classified as either aleatoric, epistemic, or a mixture of both. Aleatoric uncertainty is the natural randomness or physical variability present in the system or its environment and is thus statistical in nature. In contrast, epistemic uncertainty is uncertainty that is due to limited data or knowledge.
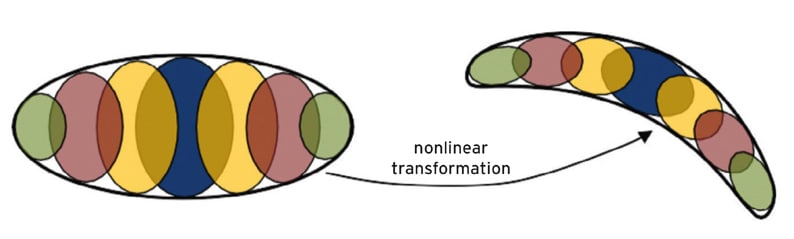
With respect to some terms, covariance realism means that the uncertainty in the state of an object can be represented as a Gaussian random variable and that the estimated mean and covariance of said Gaussian are the true mean and true covariance, respectively. Since the underlying dynamical processes are not always linear nor Gaussian, one may generalize covariance realism to uncertainty realism described by a potentially non-Gaussian probability density function. Uncertainty realism requires that all cumulants (beyond a state and covariance) be properly characterized. The relationship between covariance realism and uncertainty realism is that the former is a necessary but not a sufficient condition for achieving the latter. The two definitions coincide if the process is Gaussian.
The achievement of covariance or uncertainty realism is a challenging problem due to the complex and numerous sources of uncertainty. To achieve a proper characterization of uncertainty, one must account for the uncertainty sources in the system and roll these up into the uncertainty in the estimate at each needed time. Generic sources of uncertainties for point objects include the following:
Structural uncertainty or model bias in the model dynamics;
Uncertain parameters found in the model dynamics (including space environment) and in the measurement equation relating the dynamics to the sensor measurements;
Sensor level errors including measurement noise and sensor and navigation biases;
Inverse uncertainty quantification including the statistical orbit determination and bias estimation uncertainty;
Propagation of uncertainty;
Algorithmic uncertainty or numerical uncertainty that comes from numerical errors and numerical approximations in a computer model;
Cross-tag or misassociation uncertainty;
Hardware and software faults/errors.
Additional sources of uncertainty occur for medium to large objects called extended body uncertainties. For example, an extended body covering several pixels may have an overly optimistic (too small) covariance if the uncertainty of the estimated state only covers the centroid of the body.
The goal of correctly characterizing or quantifying uncertainty is not unique to astrodynamics. Indeed, the currently active field of uncertainty quantification deals with the same problem in many other areas of engineering and science.
As stated above, the correct characterization of the uncertainty in the state of each object is fundamental to many space surveillance and space situational awareness missions. The following four examples demonstrate the importance of covariance and uncertainty realism:
Computation of the probability of collision for conjunction assessment;
Data or track association/correlation;
Maneuver detection;
Sensor tasking and scheduling.
This work was done by Aubrey B. Poore, Jeffrey M. Aristoff, and Joshua T. Horwood of Numerica Corporation for the Air Force Space Command. AFRL-0292
This Brief includes a Technical Support Package (TSP).
Covariance and Uncertainty Realism in Space Surveillance and Tracking
(reference AFRL-0292) is currently available for download from the TSP library.
Don't have an account?
More From SAE Media Group

Motion Control Tech Briefs
Combining Multiple Gyroscope Outputs for Increased Accuracy
Aerospace & Defense Tech Briefs
The Purpose of Mixed-Effects Models in Test and Evaluation
Aerospace & Defense Tech Briefs
Integrated Underwater Security System
Aerospace & Defense Tech Briefs
New Zealand and LeoLabs Establish the First Low-Earth Orbit Regulatory Platform
Aerospace & Defense Tech Briefs
Industry Invited to Participate in AeroTech Aerospace and Defense Technical Program
Aerospace & Defense Tech Briefs
Feasibility Analysis of UAV Technology to Improve Tactical Surveillance in South Korea’s Rear Area Operations

Aerospace & Defense Tech Briefs
3D Data Acquisition Platform for Human Activity Understanding

Aerospace & Defense Tech Briefs
SAE International Extends Call for Abstracts, Seeks Submissions for AeroTech Conference
Tech Briefs
Measuring Aggressive Launch Loads on Spacecraft
Off-Highway Engineering
Addressing Electromagnetic Compatibility in the Context of Aircraft Electrification

Aerospace & Defense Tech Briefs
Low-Impact Space Weather Sensors and the U.S. National Security Spacecraft
Aerospace & Defense Tech Briefs
Adding Context to Full-Motion Video for Improved Surveillance and Situational Awareness
Aerospace & Defense Tech Briefs
Developing and Validating Statistical Cyber Defenses
Air Force Research Laboratory Technology Horizons
Intelligence Fusion System Tracks Mobile Targets
Aerospace & Defense Tech Briefs
Five Missile-Tracking Satellites Launched
Aerospace & Defense Tech Briefs
Stochastic Surveillance and Distributed Coordination
Autonomous Vehicle Engineering
Data Drives Driverless Truck Launch

Aerospace & Defense Tech Briefs
Lockheed Martin’s Next-Gen, 360-Degree Vision System Flies on the Bell V-280 Valor
Aerospace & Defense Tech Briefs
Designing for the Connected Battlespace

Tech Briefs
5 Ws of the Winged Flying Microchip
Aerospace & Defense Tech Briefs
Data Mining in Cyber Operations
Aerospace & Defense Tech Briefs
Lockheed Martin’s “Non-Operational” Space Fence Detects Indian Anti-Satellite Operations While Still in Test Mode
Overview
The document titled "Covariance and Uncertainty Realism in Space Surveillance and Tracking" is a comprehensive report that addresses the challenges and methodologies related to the propagation of uncertainty in space operations. It is structured to provide insights into the current state of knowledge and practices in the field, with a focus on improving the realism of covariance in space surveillance and tracking systems.
The report is organized into several chapters, each addressing different aspects of the topic. Chapter 1 serves as an introduction, outlining the purpose and scope of the report. It emphasizes the importance of understanding and managing uncertainty in space operations, particularly in the context of tracking objects in space.
Subsequent chapters delve into specific methodologies and metrics. Chapter 7 surveys various methods used to propagate uncertainty over time, which is crucial for accurate predictions and assessments in space surveillance. Chapter 8 proposes new metrics for evaluating the performance of different algorithms, particularly those related to uncertainty propagation. This chapter aims to establish a framework for assessing how well these algorithms perform in real-world scenarios.
Chapter 9 presents sample test cases that are intended to be expanded upon by the astrodynamics community. These test cases serve as benchmarks for evaluating the effectiveness of different algorithms and methodologies in managing uncertainty. Finally, Chapter 10 summarizes the findings of the report and offers recommendations for future enhancements, emphasizing the need for continued research and collaboration in the field.
Throughout the document, the authors highlight the necessity of creating an environment conducive to evaluating various algorithms rather than attempting to solve the problem outright. This approach allows for a more systematic assessment of the tools available for managing uncertainty in space operations.
The report is intended for a general audience, making it accessible to a wide range of stakeholders in the space community. It aims to foster collaboration and knowledge sharing among professionals involved in space surveillance and tracking, ultimately contributing to more effective and realistic approaches to managing uncertainty in this critical area of space operations.
Overall, the document serves as a valuable resource for understanding the complexities of covariance realism and the ongoing efforts to enhance the reliability of space surveillance systems.
Top Stories
INSIDERManufacturing & Prototyping
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
INSIDERManned Systems
![]() FAA to Replace Aging Network of Ground-Based Radars
FAA to Replace Aging Network of Ground-Based Radars
NewsTransportation
![]() CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
NewsSoftware
![]() Accelerating Down the Road to Autonomy
Accelerating Down the Road to Autonomy
EditorialDesign
![]() DarkSky One Wants to Make the World a Darker Place
DarkSky One Wants to Make the World a Darker Place
INSIDERMaterials
![]() Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Webcasts
Defense
![]() How Sift's Unified Observability Platform Accelerates Drone Innovation
How Sift's Unified Observability Platform Accelerates Drone Innovation
Automotive
![]() E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
Power
![]() Hydrogen Engines Are Heating Up for Heavy Duty
Hydrogen Engines Are Heating Up for Heavy Duty
Electronics & Computers
![]() Advantages of Smart Power Distribution Unit Design for Automotive...
Advantages of Smart Power Distribution Unit Design for Automotive...
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design...
Quiet, Please: NVH Improvement Opportunities in the Early Design...