



Sensor Validation Using Nonlinear Minor-Component Analysis
Linearity is not assumed and the physical plant is not modeled.
Aconcept of sensor validation using nonlinear minor-component analysis (NLMCA) has been proposed as a theoretical basis of a sensor fault-detection-and isolation (FDI) module in a fault-tolerant control system of an aircraft jet engine or other complex physical plant. As used here, "sensor validation" signifies, loosely, analysis of the readouts of all the sensors in such a system for the purpose of identifying which (if any) sensors are faulty and, if possible, the magnitudes of the faults. Once a fault in a sensor or any other component was detected and isolated, the fault-tolerant control system would automatically reconfigure itself to compensate for the effect of that and any other faults so as to maintain acceptable (or as nearly acceptable as possible) control performance of the plant even in the presence of the faults. In the case of a faulty sensor, the system would utilize any available analytical redundancy among all sensor signals to estimate the value of the physical quantity desired to be measured by that sensor, and that value would then be used for feedback control.

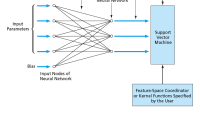
NLMCA is an extension of nonlinear principal-component analysis (NLPCA), in which a neural network or other suitable nonlinear signal-data-processing structure is used to extract the principal components, defined as the components corresponding to the largest eigenvalues of an input vector, X. The first residual (e1 C the residue left after extraction of the first principal component, PC1) is fed as input into the same NLPCA structure to obtain the second principal component (PC2), the second residual (e2) is fed into the same NLPCA structure to obtain the third principal component, and so forth. In NLPCA (see Figure 1), the process as described thus far is truncated once the principal components have been obtained. In NLMCA, the process is not so truncated and, instead, is continued to obtain the minor components (MC1...MCk), defined as those corresponding to the smallest eigenvalues.
Figure 2 depicts the FDI process according to the present concept. Under normal operating conditions with properly functioning sensors, the minor components are usually close to zero. The amounts by which the minor components differ from zero are summarized by means of a square weighted residual (SWR), which is calculated from a combination of training data and the residuals of the minor components. It has been proven that in comparison with a prior FDI measure calculated from non-weighted residuals, this SWR is more sensitive to faults and more robust to noise. This SWR in normal operation has a chisquare distribution that can easily be used to determine the threshold SWR value for a given confidence level. A fault is deemed to be detected when this SWR exceeds the threshold.

Once a fault has been thus isolated, a reverse scan method is used to estimate the reading that the faulty sensor would generate if it were not faulty. The faulty-sensor reading is replaced by a substitute reading and the SWR is calculated for the substitute reading. The faulty-sensor reading is then replaced with another substitute reading and a new SWR calculated. This procedure is repeated a number of times to obtain a series of substitute-reading/SWR combinations spanning a range of values of the physical quantity desired to be measured by the faulty sensor. The substitute reading associated with the smallest SWR is taken to be the estimate of the reading that the sensor would generate if it were not faulty.
This work was done by Kenneth Semega of the Air Force Research Laboratory; Roger Xu, Guangfan Zhang, Leonard Haynes, and Chiman Kwan of Intelligent Automation, Inc.; and Xiaodong Zhang of GM R & D and Planning. AFRL-0035
This Brief includes a Technical Support Package (TSP).
Sensor Validation Using Nonlinear Minor-Component Analysis
(reference AFRL-0035) is currently available for download from the TSP library.
Don't have an account?
More From SAE Media Group






Tech Briefs
How AI Can Protect the Electric Grid

Tech Briefs
Robust Aeroservoelastic-Stability Margins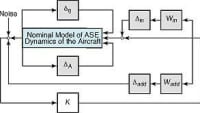



Tech Briefs
Program for Designing a Mechanical System


Aerospace & Defense Tech Briefs
Covariance and Uncertainty Realism in Space Surveillance and Tracking

Tech Briefs
Algorithm for Compressing Time-Series Data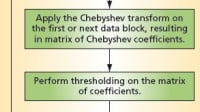
Motion Control Tech Briefs
Combining Multiple Gyroscope Outputs for Increased Accuracy
Robotics & Automation INSIDER
New System Enables Robots to Solve Manipulation Problems in Seconds

Air Force Research Laboratory Technology Horizons
Developing Condition-Based Maintenance

Tech Briefs
Autonomous Environment-Monitoring Networks


Photonics & Imaging Technology
Analysis and Simulation of Low-Light INL in CMOS Image Sensors
Robotics & Automation INSIDER
A Faster, Better Way to Train General-Purpose Robots
Tech Briefs
5G, AI Team Up to Optimize Military Fueling
Overview
The document titled "Sensor Validation Using Nonlinear Minor Component Analysis" presents a comprehensive framework for sensor validation, which is crucial for engine health management systems, particularly in the context of jet engines. The authors, including Roger Xu and Kenneth Semega, emphasize the importance of accurate sensor data for effective fault detection and diagnosis in propulsion systems.
The paper outlines a novel approach that employs Nonlinear Minor Component Analysis (NLMCA) to establish analytical redundancy among sensors. This method is advantageous as it is data-driven and does not require faulty data, relying solely on sensor measurements during normal operational conditions. This capability is essential for enhancing the reliability of fault detection and isolation processes.
The authors introduce practical fault detection and isolation indices based on Squared Weighted Residuals (SWR), which provide more accurate and robust results compared to traditional methods like Squared Prediction Error (SPE). This improvement is significant for identifying and classifying sensor failures, which is a critical step in maintaining engine performance and safety.
Additionally, the paper proposes an innovative fault size estimation method that utilizes reverse scanning of the residuals, further enhancing the accuracy of fault diagnosis. The authors validate their approach through extensive simulations based on a nonlinear prototype non-augmented turbofan engine model, demonstrating its effectiveness in real-world applications.
The introduction of this unified framework for sensor validation is positioned as a significant advancement in the field of propulsion health management. By integrating advanced analytical techniques with practical fault detection methods, the research aims to improve the safety and performance of future jet engines. The findings underscore the necessity of accurate sensor data and the potential of advanced algorithms to enhance fault tolerance in aviation systems.
Overall, this document contributes valuable insights into the development of more reliable and efficient engine health management systems, highlighting the critical role of sensor validation in ensuring flight safety and operational efficiency. The research reflects a collaborative effort among experts in the field and is intended for presentation at the 3rd International Symposium on Neural Networks (ISNN 2006).
Top Stories
INSIDERManufacturing & Prototyping
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
INSIDERManned Systems
![]() FAA to Replace Aging Network of Ground-Based Radars
FAA to Replace Aging Network of Ground-Based Radars
NewsTransportation
![]() CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
NewsSoftware
![]() Accelerating Down the Road to Autonomy
Accelerating Down the Road to Autonomy
EditorialDesign
![]() DarkSky One Wants to Make the World a Darker Place
DarkSky One Wants to Make the World a Darker Place
INSIDERMaterials
![]() Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Webcasts
Defense
![]() How Sift's Unified Observability Platform Accelerates Drone Innovation
How Sift's Unified Observability Platform Accelerates Drone Innovation
Automotive
![]() E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
Power
![]() Hydrogen Engines Are Heating Up for Heavy Duty
Hydrogen Engines Are Heating Up for Heavy Duty
Electronics & Computers
![]() Advantages of Smart Power Distribution Unit Design for Automotive...
Advantages of Smart Power Distribution Unit Design for Automotive...
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design...
Quiet, Please: NVH Improvement Opportunities in the Early Design...