



Computer-Generated Scenes Provide Virtual Testing for Autonomous Vehicles

The next million miles of autonomous-vehicle test roadways await in a start-up company’s virtual -orld toolbox that is targeting its next release for early 2019.

“For each mile of real-world autonomous-vehicle testing, developers will test hundreds of thousands of simulated driving miles,” declared Alex Goldberg, CTO of VectorZero, a Carlsbad, California start-up company whose RoadRunner software product debuted in July 2018.
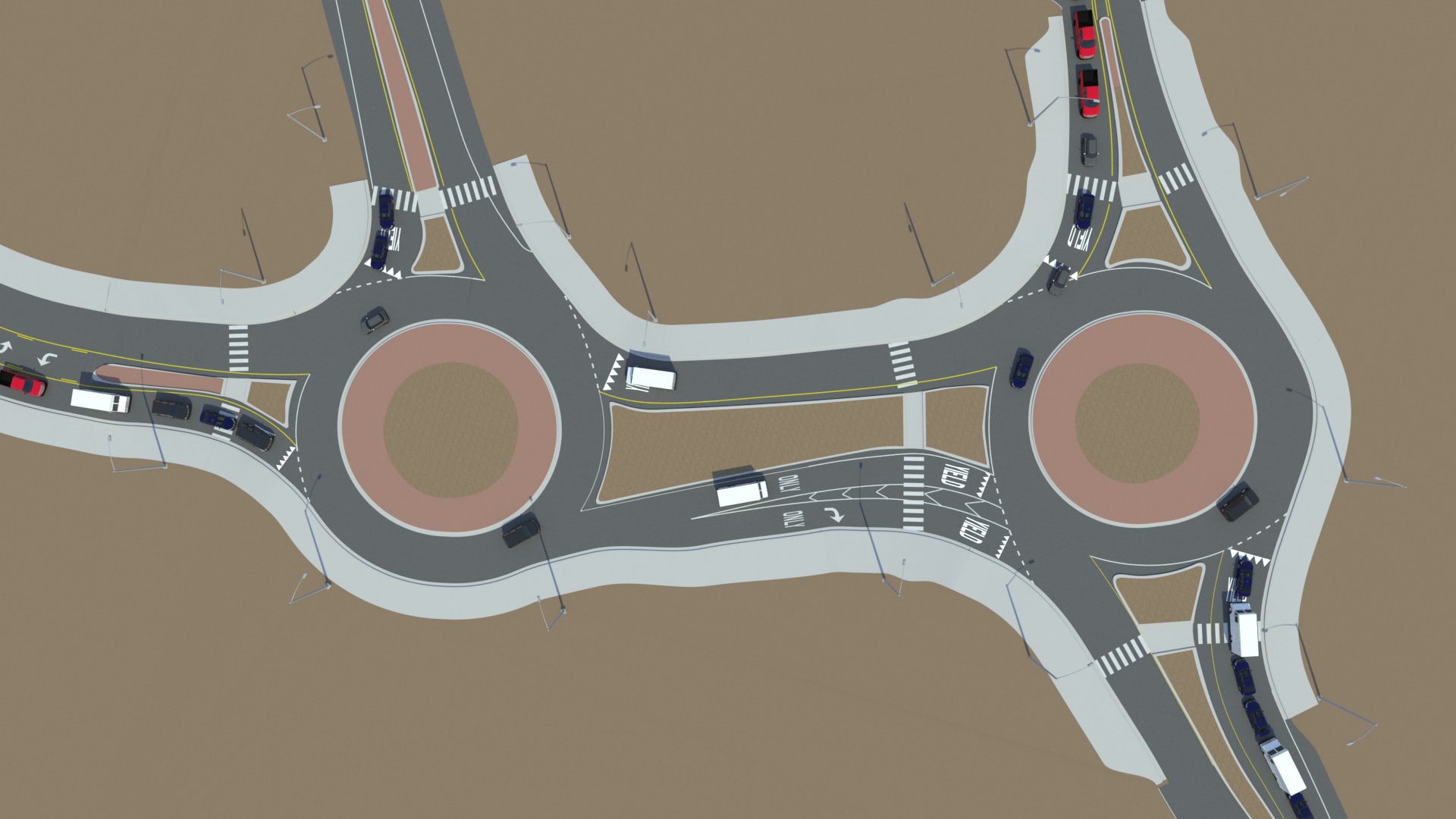
RoadRunner enables users to create virtual roads that incorporate curvature, vertical slope, banking and crowning.
“These virtual environments can include imagined locations as well as real-world courses and roadways. With RoadRunner’s intuitive user interface, anyone can create complex roadways and intersections in minutes,” Goldberg explained.
Gil Amid, Vice President of Operations and Business Development for Foretellix, an Israeli-based start-up company focused on giga-scale intelligent verification of autonomous systems, likes the ease-of-use with the RoadRunner product. “It enables a quick and productive way to build a selection of road topologies using a comfortable graphical user interface,” according to Amid.

The ability to create virtual roads with intersections, lane markings, traffic signals and other features is vital on the pathway of achieving SAE Level 5 automation, according to Goldberg.
“Level 5 requires robust and safe behavior in an immense number of scenarios and locations — far too many to test on real roadways. That’s why the ability to model detailed virtual environments and scenarios is critical to enable testing of unlikely scenarios for both internal development and regulatory validation of autonomous vehicle candidates,” noted Goldberg.

Virtual roads can be a viable testing companion to closed-course and public-road testing of autonomous vehicles.
“Let’s say you want to recreate the scene where there has been an accident involving an autonomous vehicle,” said Peter Fryscak, VectorZero’s Director of Business Development. “With RoadRunner, you can quickly model the roads and surrounding environment and then load it into your simulator to reproduce and study the incident.”
RoadRunner scenes can be built on Windows or Linux platforms. “We can import geographic information system (GIS) files, aerial images, elevation maps, point-cloud and other data for translation into a realistic scene. That scene can then be exported in simulation formats, including OpenDrive, Unreal, Unity, and FBX,” said Fryscak.
In early 2019, VectorZero plans to release a ‘scenario’ editor. “This product will include a wide range of configurable vehicular and pedestrian traffic participants with convincing animations,” Goldberg noted.
More From SAE Media Group
Autonomous Vehicle Engineering
Steering Toward Full Vehicle Autonomy
Autonomous Vehicle Engineering
Data Drives Driverless Truck Launch
Autonomous Vehicle Engineering
Speeding AV Testing with a Digital Twin
Autonomous Vehicle Engineering
Accelerating AV Training Data and Testing
Aerospace & Defense Tech Briefs
Industry Invited to Participate in AeroTech Aerospace and Defense Technical Program
Automotive Engineering
New Proving-Ground Tools Needed to Manage AV Testing
Autonomous Vehicle Engineering
'Road Race' for AV Testing May Be Slowing
Off-Highway Engineering
Commercial Vehicle ADAS: Testing, Testing and More Testing
Autonomous Vehicle Engineering
Truck Platooning an Evolving Pathway to Full Autonomy
Automotive Engineering
Volvo Cars Mixes Virtual with Real-World Testing
Autonomous Vehicle Engineering
Making the Strategic Move into AV Testing
Autonomous Vehicle Engineering
'Level 2+': Making Automated Driving Profitable, Mainstream
Automotive Engineering
Autonomous Transit Bus Nears Its First Year of Operation
Off-Highway Engineering
Design Tools Ensure Component Compatibility, Create Autonomous Driving Tests
ADAS & Autonomous Vehicle Engineering
The Road to Zero Prototypes
Automotive Engineering
Thermal Imaging Makes Its Case for ADAS, AVs
Aerospace & Defense Tech Briefs
SAE International Extends Call for Abstracts, Seeks Submissions for AeroTech Conference
Autonomous Vehicle Engineering
Complexity of Autonomous-Systems Simulation, Validation Soars to the Clouds
Off-Highway Engineering
CV Autonomy: Picking the 'Low-Hanging Fruit'
Automotive Engineering
AB Dynamics Supports Germany’s PEGASUS Project Test of Multiple Autonomous Vehicle Control
Off-Highway Engineering
Lifelike Simulation Accelerates Middle-Mile Autonomous Trucking
Motion Design INSIDER
Can Self-Driving Cars Navigate Roundabouts?
Autonomous Vehicle Engineering
Simulation’s Next Generation
Autonomous Vehicle Engineering
GM Announces Door-To-Door Ultra Cruise ADAS
ADAS & Autonomous Vehicle Engineering
AV Simulation Testing Faces a Long and Winding Road
Autonomous Vehicle Engineering
Smart Tech Revolutionizing the Traffic Light
Autonomous Vehicle Engineering
Europe’s Latest AV Testing Facilities Key for Swift Autonomy Adoption
Automotive Engineering
Multimatic Opening New Michigan Virtual Vehicle-Dynamics Development Center
Automotive Engineering
DSpace Launches Simphera AV Development Simulator
ADAS & Autonomous Vehicle Engineering
The ‘Framework’ for AV Development
Top Stories
INSIDERManufacturing & Prototyping
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
INSIDERManned Systems
![]() FAA to Replace Aging Network of Ground-Based Radars
FAA to Replace Aging Network of Ground-Based Radars
NewsTransportation
![]() CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
NewsSoftware
![]() Accelerating Down the Road to Autonomy
Accelerating Down the Road to Autonomy
EditorialDesign
![]() DarkSky One Wants to Make the World a Darker Place
DarkSky One Wants to Make the World a Darker Place
INSIDERMaterials
![]() Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Webcasts
Defense
![]() How Sift's Unified Observability Platform Accelerates Drone Innovation
How Sift's Unified Observability Platform Accelerates Drone Innovation
Automotive
![]() E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
Power
![]() Hydrogen Engines Are Heating Up for Heavy Duty
Hydrogen Engines Are Heating Up for Heavy Duty
Electronics & Computers
![]() Advantages of Smart Power Distribution Unit Design for Automotive...
Advantages of Smart Power Distribution Unit Design for Automotive...
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design...
Quiet, Please: NVH Improvement Opportunities in the Early Design...