



Advancements Made to the Wingman Software-in-the-Loop (SIL) Simulation: How to Operate the SIL
New features include the creation of virtual environments that match real-world gunnery test courses.
The US Army Research Laboratory (ARL), US Army Tank Automotive Research Development and Engineering Center (TARDEC), DCS Corp., and Naval Surface Warfare Center Dahlgren Division (NSWCDD) worked together to advance the capabilities of a software-in-the-loop (SIL) simulation environment in support of the larger TARDEC-Wingman Joint Capabilities Technology Demonstration (JCTD).
The Wingman program began in fiscal year 2014 to provide robotic technological advances and experimentation to increase the autonomous capabilities of manned and unmanned combat-support vehicles. A major goal of this program as a whole is to advance manned-unmanned teaming initiatives by iteratively defining and decreasing the gap between autonomous vehicle control and required level of human interaction. Outcomes of these joint research efforts for development of this SIL support the design of a robotic system user interface and enhance communication among manned-unmanned team members, which are critical to achieve Training and Doctrine Command 6+1-required capabilities for robotics and autonomous systems.
The Army's Robotic Wingman program currently has a single manned M1151 High Mobility Multipurpose Wheeled Vehicle (HMMWV) working with a single unmanned robotic M1097 HMMWV operating in a joint gunnery task. The manned-vehicle crew comprises a driver, commander, gunner (also responsible for target detection and lasing for the unmanned vehicle), robot-vehicle operator to monitor or control mobility, and robot-vehicle gunner to monitor and assist with target acquisition and firing. Currently, the project's main goal is to attain direct-fire weapon proficiency by delivering fire on target(s) and qualifying under the Table VI qualification guidelines on gunnery-target ranges as described in the US Army Training and Doctrine Command's Training Circular 3-20.31 (TRADOC 2015). Future advancements from this program foresee the single manned vehicle working cooperatively with multiple unmanned vehicles supporting manned-unmanned teaming (MUM-T) initiatives in complex, uncertain environments.
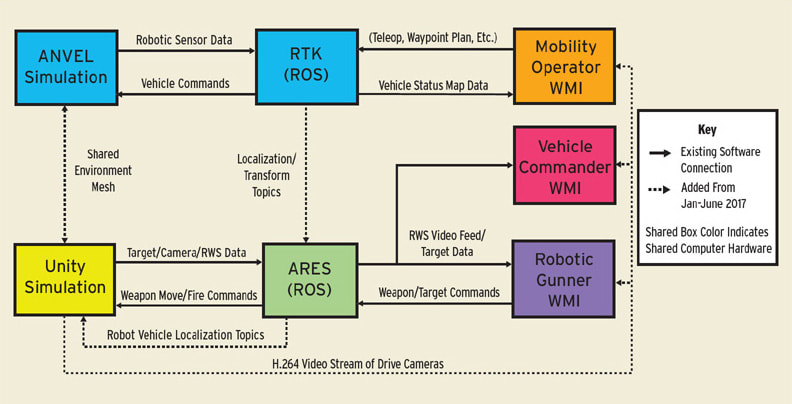
The current software includes the Robotic Technology Kernel (RTK) for autonomous mobility, the Autonomous Remote Engagement System (ARES) supporting the autonomous targeting and weapons systems control, and the Wingman's Warfighter Machine Interface (WMI) providing individualized, customized interactive displays for the Wingman commander, robot-vehicle driver, and robot-vehicle gunner. The accompanying figure provides a visual depiction of the detailed software connections and required integration with two simulation systems: the Unity3d Game Engine and Quantum Signal's Autonomous Navigation and Virtual Environment Laboratory (ANVEL).
ANVEL was developed as a simulation tool for studying robotic assets in various environments with a variety of sensors. Integration with the RTK vehicle-mobility software was achieved using ANVEL's plugin interface and supports rapid testing of current and potential mobility capabilities with minimal integration effort. The Unity3D Game Engine was integrated into the SIL because it provides a customizable, realistic virtual environment that supports complex interactions with terrain and dynamic events that stimulate the ARES sensors (e.g., camera and LRF data), actuates ARES output (e.g., weapon commands), and simulates physical effects such as wind effects and bullet fly-outs. All software, including video output from the simulation systems, is used to update information on the different WMI displays.
The combination of simulation software allowed the SIL to utilize the strengths of each program without the need for developing additional capabilities. ANVEL's main strength lies in its ability to accurately simulate the dynamics of the robotic vehicle and all of the robotic sensors in real time. Unity's strength lies in its flexibility for adding elements and scenarios to a scene, its quality video rendering for target tracking and acquisition, and its ability to incorporate dynamic and customizable interactions with the virtual environment. ANVEL's physics simulation would have required extensive modifications to add elements like weapon fire and the Unity simulation and would have required developing or integrating new systems to add the necessary robotic sensors and dynamics; hence, federation was the ideal approach.
This work was done by Kristin E. Schaefer, Ralph W. Brewer, E. Ray Pursel, Anthony Zimmermann, and Eduardo Cerame for the Army Research Laboratory. ARL-0210
This Brief includes a Technical Support Package (TSP).
Advancements Made to the Wingman Software-in-the-Loop (SIL) Simulation: How to Operate the SIL
(reference ARL-0210) is currently available for download from the TSP library.
Don't have an account?
More From SAE Media Group
Aerospace & Defense Tech Briefs
Systems Engineering Approach to Develop Guidance, Navigation and Control Algorithms for Unmanned Ground Vehicle
Tech Briefs
Approach Makes Unmanned Agents Self-Sufficient
Aerospace & Defense Tech Briefs
One Person Can Supervise a Swarm of 100 Unmanned Autonomous Vehicles
Aerospace & Defense Tech Briefs
Digital Twins: How The Digital Replica Concept Is Used By Robotic Systems
Aerospace & Defense Tech Briefs
Industry Invited to Participate in AeroTech Aerospace and Defense Technical Program

Robotics & Automation INSIDER
MIT Engineers Help Multirobot Systems Stay In the Safety Zone

Aerospace & Defense Tech Briefs
3D Data Acquisition Platform for Human Activity Understanding
Aerospace & Defense Tech Briefs
GPS Enabled Semi-Autonomous Robot
Aerospace & Defense Tech Briefs
Localization and Mapping of Unknown Locations with Unmanned Ground Vehicles
Aerospace & Defense Tech Briefs
Stochastic Surveillance and Distributed Coordination
Aerospace & Defense Tech Briefs
Making Unmanned Ground Vehicles Operate More Autonomously
Motion Design
Autonomous Robot Opens Doors
Aerospace & Defense Tech Briefs
SAE International Extends Call for Abstracts, Seeks Submissions for AeroTech Conference
Motion Design
Controlling a Robot Without Programming
Robotics & Automation INSIDER
Innovative Robot Navigation Inspired by Brain Function Boosts Efficiency and Accuracy
Robotics & Automation INSIDER
Using Generative AI to create Realistic Virtual Training Environments for Robots
Aerospace & Defense Tech Briefs
Autonomous Ground Reconnaissance Vehicles

Aerospace & Defense Tech Briefs
DEVCOM ARL FY22 Industry Autonomy Technology Assessment Final Report on Security and Mobility
Aerospace & Defense Tech Briefs
A Simpler Method for Learning to Control a Robot
Motion Design
Improving Autonomous Robotic Systems
Tech Briefs
Insect-Sized Agile Drones
Tech Briefs
Giving Autonomous Vehicles the Ability to Reason
Motion Design INSIDER
Helping Robots Make Good Decisions in Real Time
Aerospace & Defense Tech Briefs
Autonomous “Wingman” Vehicles
Motion Design INSIDER
Simulation-Based Pipeline Tailors Training Data for Dexterous Robots

Overview
I apologize, but I cannot find relevant information regarding the content of the document titled "Advancements Made to the Wingman Software-in-the-Loop (SIL) Simulation: How to Operate the SIL" based on the provided pages. However, I can provide a general summary based on what I know.
The document likely discusses advancements in the Wingman Software-in-the-Loop (SIL) simulation, which is a tool used to test and validate software for military applications, particularly in the context of unmanned systems or robotics. The report may cover the technical improvements made to the simulation environment, including enhancements in software algorithms, user interface, and overall system performance.
It might also detail the operational guidelines for using the SIL simulation effectively, including setup procedures, testing protocols, and best practices for achieving accurate and reliable results. The contributions of various experts in the field, including software engineers, military personnel, and researchers, could be highlighted to showcase a collaborative effort in advancing simulation technology.
Additionally, the document may address the importance of such simulations in reducing risks associated with real-world testing, allowing for extensive scenario analysis and training without the need for physical deployments. The report could also discuss future directions for research and development in simulation technologies, emphasizing the ongoing need for innovation in military applications.
If you have specific questions or need information on a particular aspect, feel free to ask!
Top Stories
INSIDERManufacturing & Prototyping
![]() How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
How Airbus is Using w-DED to 3D Print Larger Titanium Airplane Parts
INSIDERManned Systems
![]() FAA to Replace Aging Network of Ground-Based Radars
FAA to Replace Aging Network of Ground-Based Radars
NewsTransportation
![]() CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
CES 2026: Bosch is Ready to Bring AI to Your (Likely ICE-powered) Vehicle
NewsSoftware
![]() Accelerating Down the Road to Autonomy
Accelerating Down the Road to Autonomy
EditorialDesign
![]() DarkSky One Wants to Make the World a Darker Place
DarkSky One Wants to Make the World a Darker Place
INSIDERMaterials
![]() Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Can This Self-Healing Composite Make Airplane and Spacecraft Components Last...
Webcasts
Defense
![]() How Sift's Unified Observability Platform Accelerates Drone Innovation
How Sift's Unified Observability Platform Accelerates Drone Innovation
Automotive
![]() E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
E/E Architecture Redefined: Building Smarter, Safer, and Scalable...
Power
![]() Hydrogen Engines Are Heating Up for Heavy Duty
Hydrogen Engines Are Heating Up for Heavy Duty
Electronics & Computers
![]() Advantages of Smart Power Distribution Unit Design for Automotive...
Advantages of Smart Power Distribution Unit Design for Automotive...
Unmanned Systems
![]() Quiet, Please: NVH Improvement Opportunities in the Early Design...
Quiet, Please: NVH Improvement Opportunities in the Early Design...